


发展历程
历史
16世纪最早的相机:暗箱
(小孔成像)
1963年第一篇计算机视觉博士论文「Block world-Larry Roberts」,视觉世界简化为简单的几何形状,识别它们,重建这些形状。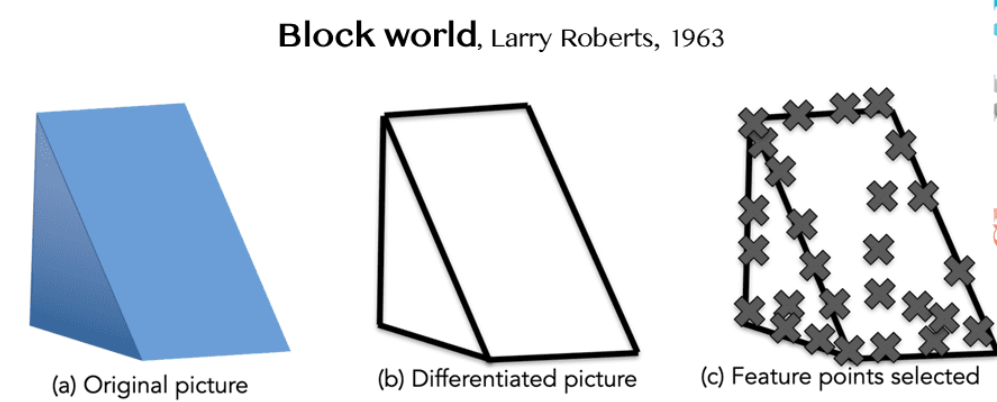
1966年MIT暑期项目「The Summer Vision Project」目的是构建视觉系统的重要组成部分。
1970s MIT视觉科学家David Marr编写了《VISION》,提出了视觉表现的阶段,如原始草图、零交叉点、圆点、边缘、条形、末端、虚拟线、组、曲线边界等概念。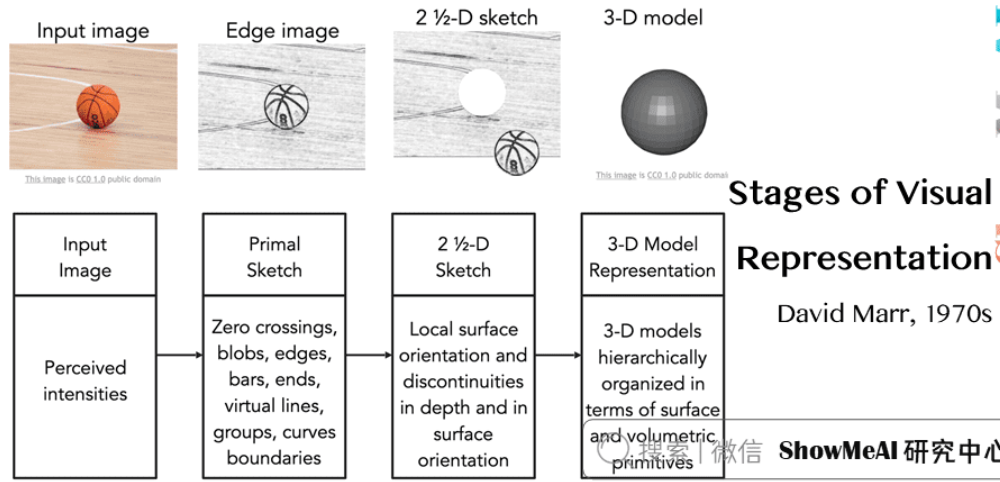
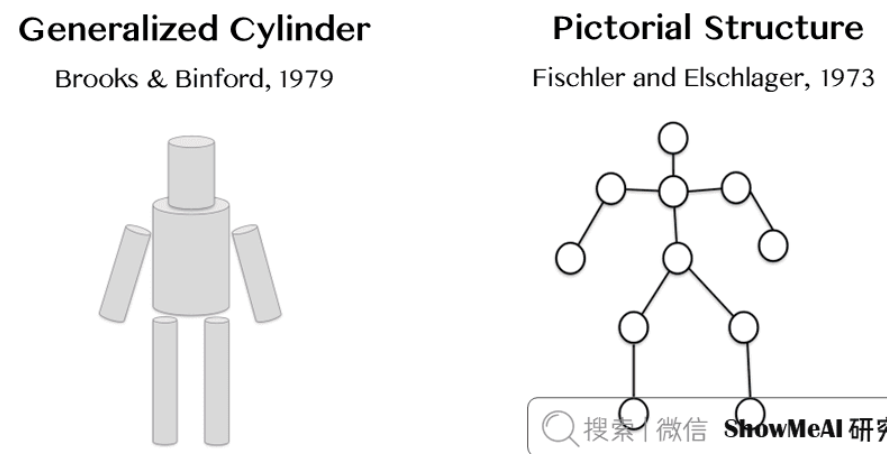
1973年后,斯坦福科学家提出 **「广义圆柱体」**和 「圆形结构」,每个对象都是由简单的几何图形单位组成。
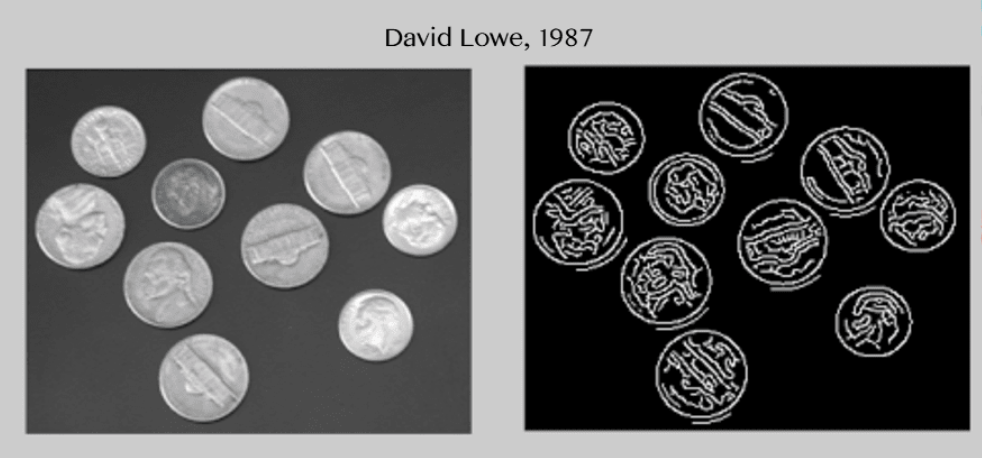
1987年David Lowe尝试用线和边缘来构建识别。
1997年Shi & Malik提出,若识别太难了,就先做目标分割,即把一张图片的像素点归类到有意义的区域。

2001年机器学习快速发展(尤其是统计学习方法),出现了SVM(支持向量机)、boosting、图模型等。Viola & Jones发表了使用AdaBoost算法进行实时面部检测的论文「Face Detection」,2006年富士推出可以实时面部检测的数码相机。
1999年David Lowe发表**”SIFT” & Object Recognition**,提出SIFT特征匹配,先在目标上确认关键特征,再与相似目标匹配,完成目标识别。从90年代到2000年,思想是基于特征的目标识别。
【目标分割与特征识别】
目标分割:
- 定义:在图像中识别和标记出每个像素属于哪个对象,通常通过像素级分类实现。
- 方法:如U-Net、Mask R-CNN等语义分割模型,输出每像素类别标签。
- 结果:输出与输入图像同尺寸的分割图,每像素分配类别,实现像素级识别。
基于特征的目标识别:- 定义:检测和识别特定对象,提取特征并与类别匹配。
- 方法:如Faster R-CNN、YOLO等对象检测模型,输出对象位置和类别。
- 结果:输出边界框,指示对象位置和类别。
2006年Lazebnik, Schmid & Ponce发表「Spatial Pyramid Matching」,通过空间金字塔匹配算法将图片各部分特征组合,作为特征描述符,再用SVM分类。
2005年后,方向梯度直方图和可变形部件模型用于人体姿态识别。
21世纪早期,数码相机发展,图片质量提升,出现了标注数据集。PASCAL VOC有20个类别,每类成千上万图片,推动算法发展。
普林斯顿和斯坦福提出识别大部分物体,机器学习易过拟合,部分原因是数据复杂、模型高维、参数多,训练数据不足时易过拟合,难以泛化。
Justin教授认为,CV发展主要取决于三个因素:算法、数据、计算,对应深度学习、ImageNet、GPU。
李飞飞:两方面动力:①识别万物;②克服过拟合。
ImageNet项目收集上亿张图片,用WordNet排序,最终有1500万~4000万图片,分22000多类。推动目标检测算法发展。
2009年起,ImageNet大规模视觉识别竞赛(ILSVRC)推动基准测试,140万目标图像,1000种类别。2012年AlexNet CNN模型大幅降低错误率,成为里程碑。
近代技术发展
卷积神经网络(CNN)成为图像识别最重要的模型之一。
2010年NEC-UIUC仍用层次结构、检测边缘、不变特征。2012年AlexNet重大突破,7层CNN。2014年GoogLeNet、VGG,2015年微软残差网络ResNet达152层。
CNN早在1998年由Yann LeCun团队发明,用于手写数字识别。结构为输入像素、多层卷积、下采样、全连接。
随着GPU等算力提升,开发出更大更深的CNN模型。数据集创新和算力提升推动模型能力提升。
后续有许多创新CNN结构,帮助模型在更大更深时也能训练和对抗过拟合。
视觉智能探索超越图像识别,如语义分割、知觉分组、3D重构、动作识别、增强现实、虚拟现实等。
如2015CVPR Johnson的「Image Retrieval using Scene Graphs」,视觉基因组数据集不仅框出物体,还描述对象关系、属性、动作等,视觉系统可做丰富任务。
人类可丰富描述场景,结合知识和经验理解图片。典型任务如看图说话(image captioning),以丰富方式理解图片故事,是持续推进的研究领域。
图像分类
图像分类是计算机视觉的核心任务,许多视觉问题(如目标检测、语义分割)都可归结为图像分类。图像分类即:给定一个固定的标签集合,对于输入图像,从中选出一个标签分配给该图像。
挑战
- 对计算机而言,图像是像素矩阵;对人类,图像包含丰富语义。
- 存在巨大的语义鸿沟。
- 例如:输入一张小猫图片,模型需判断其属于${猫, 狗, 帽子, 杯子}$中的哪一类。输入数据为$3$维数组(RGB),如$600\times800\times3=1440000$个数字,每个在$[0,255]$区间。
- 任务:将这些数字映射为如”猫”这样的标签。
图像分类算法需具备鲁棒性,能适应如下变化:
- 视角变化(Viewpoint variation):同一物体多角度展现。
- 大小变化(Scale variation):物体可视大小变化。
- 形变(Deformation):物体形状可变。
- 遮挡(Occlusion):物体部分被遮挡。
- 光照条件(Illumination conditions):光照影响像素。
- 背景干扰(Background clutter):物体与背景混杂。
- 类内差异(Intra-class variation):同类物体外形差异大。
- 场景物体干扰(Context):如猫身上有阴影等。
解决方法:采用数据驱动算法——无需手工定义”猫”,只需大量猫图片,模型自动学习。优点:可重用性强。
数据驱动
- 传统”硬编码”方法:如提取边缘、定义规则(如三线交叉为耳朵),效果差且泛化性差。
- 数据驱动算法:为每类物体收集大量样例,机器学习归纳规律,生成分类器模型。
过程:
- 输入:$N$个图像,每个有$K$类标签之一,称为训练集。
- 学习:用训练集学习每类的模式规律(分类器训练)。
- 评价:用未见过的图像测试分类器,将预测标签与真实标签对比,评价分类器质量。
范式与模型评估基础
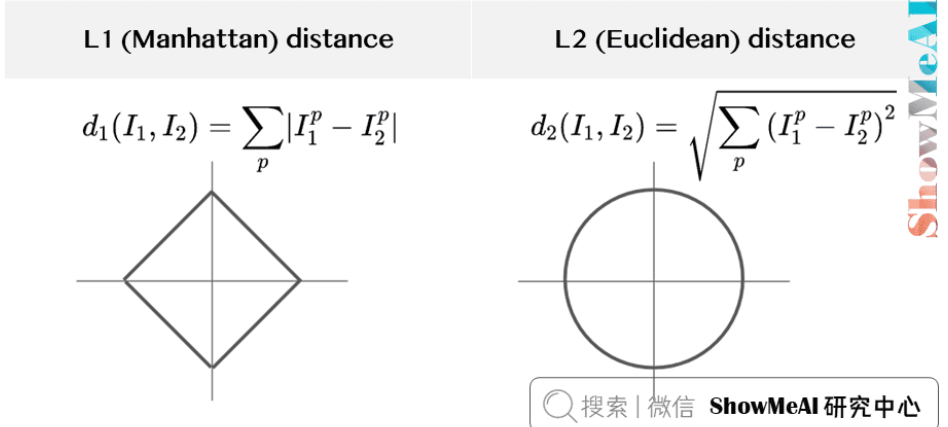
L1 距离(曼哈顿距离)
- 比较$32\times32\times3$像素块,将两张图片转为向量$I_1$和$I_2$,计算L1距离:
$$
d_1(I_1, I_2) = \sum_p |I_1^p - I_2^p|
$$
- $p$为像素点,$I^p$为第$p$个像素值。
- L1距离为0表示图片完全相同,差异大则L1值大。
代码示例:
1 | Xtr,Ytr,Xte,Yte=load_CIFAR10('data/cifar10/') |
- Xtr: 训练集图片,Xte: 测试集图片,Ytr/Yte: 标签。
- Xtr_rows/Xte_rows: 每张图片展平成3072维行向量。
分类器接口:
train(X, y):用训练集训练。predict(X):预测新数据标签。
Nearest Neighbor分类器实现(L1距离):
1 | import numpy as np |
- 训练复杂度$O(1)$,预测复杂度$O(N)$。
- CIFAR-10准确率约$38.6%$。
L2 距离(欧式距离)
- 公式:
$$
d_2(I_1, I_2) = \sqrt{\sum_p (I_1^p - I_2^p)^2}
$$ - 代码只需将距离计算改为:
1 | distances = np.sqrt(np.sum(np.square(self.Xtr - X[i,:]), axis = 1)) |
- 实际可省略sqrt,仅影响数值大小不影响排序。
- CIFAR-10准确率约$35.4%$。
L1与L2比较
- L1依赖坐标轴,决策边界贴近坐标轴;L2决策边界为圆形。
- L2对大差异更敏感,L1对特征敏感。
- 实践中可都尝试,选效果更好的。
最邻近算法KNN
- 训练:记住所有训练数据和标签。
- 预测:与所有训练数据比较,找最接近的标签。
- 缺点:存储空间大,预测慢。
CIFAR-10数据集
- 10类,60000张$32\times32$彩色图片,50000训练,10000测试。
KNN改进
- KNN思想:找$k$个最近邻,取出现最多的标签作为预测。
- $k=1$即最邻近分类器。
- $k$大时分类更平滑,对异常值更鲁棒。
KNN核心思想
- 基于空间距离的特征空间划分。
- 分类由邻居多数表决决定。
工作原理
- 有标签的训练集。
- 输入新数据,与训练集比较,找$k$个最近邻,取最多的标签。
- $k$一般不大于20,常用交叉验证选最优$k$。
参数选择
- $k$大:模型简单,误差小但近似误差大。
- $k$小:对噪声敏感,易过拟合。
- 二分类常用奇数$k$避免平票。
缺点
- 对噪声敏感($k$小),只考虑数量忽略距离($k$大)。
- 训练快,预测慢。
- 高维数据”维度灾难”,需大量训练样本。
超参数调优
- $k$和距离度量(L1/L2/点积等)为超参数。
- 不能用测试集调优,只能用验证集。
- 常用hold-out法:训练集划分一部分为验证集。
- 交叉验证法:训练集分多份,轮流做验证。
- 深度学习一般不用交叉验证,因计算量大。
实际应用建议
- 数据预处理(清洗、归一化)。
- 高维数据可降维(如PCA)。
- 随机分训练/验证集。
- 在验证集上调优$k$和距离度量。
- 分类慢可用近似最近邻库(如FLANN)。
- 记录最优参数,最终只用一次测试集评估。
线性分类:评分函数
线性分类概述
- KNN无参数,仅存储数据,$k$为超参数。
- 参数模型:训练后得到参数,预测时仅用参数,无需训练数据。
- 线性分类器是最简单的参数模型。
线性分类方法两部分:
- 评分函数(score function):原始数据到类别分值的映射。
- 损失函数(loss function):量化分数与真实标签一致性,转化为最优化问题,通过更新参数最小化损失。
评分函数
- 评分函数将像素值映射为各类别得分。
- 以CIFAR-10为例,$N=50000$,每样本$x_i\in\mathbb{R}^D$,$D=3072$,标签$y_i\in[1,K]$,$K=10$。
- 定义评分函数:$f: \mathbb{R}^D \to \mathbb{R}^K$,即$D$维输入映射为$K$维分数。
- 最简单模型:线性模型
$$
f(x_i, W, b) = W x_i + b
$$
- $W$为权重矩阵,$b$为偏置项。
- $x_i$为$[D\times1]$列向量,$W$为$[K\times D]$,$b$为$[K\times1]$。
- 输入3072维,输出10维。
- 训练数据用于学习$W$和$b$,训练后仅需参数即可预测。
- 只需一次矩阵乘法和加法,预测效率高。
线性分类器理解
- $W$是所有分类器的组合:$W$的每一行是一个分类器,对应一个类别。
- 模板匹配:$W$每行是一个类别模板,分数为输入与模板的内积。
- 高维空间点:每个类别分数是空间中的线性函数。$W$每行对应一个超平面,偏置$b$决定平移。
- 没有偏置时,所有超平面都过原点。
- 线性分类器本质是找到一条直线(或超平面)分隔不同类别。
偏置项和权重合并
- 可将$W$和$b$合并为一个矩阵,$x_i$增加一维常数1。
- 新公式:
$$
f(x_i, W) = W x_i
$$ - $x_i$为$[3073\times1]$,$W$为$[10\times3073]$,多出一列对应偏置。
图像数据预处理
- 常对每个特征减去均值(中心化),如每个像素减去训练集均值。
- 可进一步归一化到$[-1,1]$区间。
线性分类器失效情形
- 线性分类器只能分隔线性可分数据。
- 若数据分布无法用一条直线/超平面分开,则线性分类器失效。
- 典型失效情形:
- 奇偶分类:类别交替出现,无法用直线分开。
- 线性不可分:如$1\leq |x|_2 \leq \sqrt{2}$,数据点分布在圆环内,无法用直线分开。
- 多模型:需多条直线/超平面才能分开。
损失函数与最优化
线性分类:损失函数
概念
定义损失函数(Loss Function)(也叫代价函数 Cost Function 或目标函数 Objective Function)来衡量对预估结果的「不满意程度」。当评分函数输出结果与真实结果之间差异越大,损失函数越大,反之越小。
对于有 $N$ 个训练样本对应 $N$ 个标签的训练集数据 $(x_i, y_i)$,损失函数定义为:
$$
L = \frac{1}{N} \sum_{i=1}^N L_i(f(x_i, W), y_i)
$$
即每个样本损失函数求和取平均。目标就是找到一个合适的 $W$ 使 $L$ 最小。
注意:真正的损失函数 $L$ 还有一项正则损失 $R(W)$,后面会有说明。
多类支持向量机损失
Multiclass SVM Loss
数据损失(data loss)
SVM 的损失函数希望 SVM 在正确分类上的得分始终比不正确分类上的得分高出一个边界值 $\Delta$。
对于第 $i$ 个数据 $(x_i, y_i)$,评分函数 $f(x_i, W)$ 计算不同分类类别的分值,记为 $s$,第 $j$ 个类别的得分为 $s_j$。
多类 SVM 的损失函数定义如下:
$$
L_i = \sum_{j \neq y_i} \max(0, s_j - s_{y_i} + \Delta)
$$
直观来看,如果真实标签的分数比其他某个标签的分数高出 $\Delta$,则对该其他标签的损失为 $0$;否则损失就是 $s_j - s_{y_i} + \Delta$。
示例计算:
假设 $y_i = 0, 1, 2$,对于第1张图片「小猫」,评分 $s = [3.2, 5.1, -1.7]$,$s_{y_i} = 3.2$,$\Delta = 1$,则:
$$
L_1 = \max(0, 5.1 - 3.2 + 1) + \max(0, -1.7 - 3.2 + 1) = \max(0, 2.9) + \max(0, -3.9) = 2.9 + 0 = 2.9
$$
同理可得 $L_2 = 0$,$L_3 = 12.9$,整个训练集的损失:
$$
L = \frac{2.9 + 0 + 12.9}{3} = 5.27
$$
合页损失(hinge loss):
$$
L_i = \sum_{j \neq y_i} \max(0, w_j^T x_i - w_{y_i}^T x_i + \Delta)
$$
其中 $w_j$ 是 $W$ 的第 $j$ 行。
正则化损失(regularization loss)
假设有一组 $W$ 能正确分类所有数据,即所有 $L_i = 0$,但 $W$ 并不唯一。只要任意 $\lambda > 1$,$\lambda W$ 也可以满足 $L_i = 0$。
为此,向损失函数增加正则化惩罚 $R(W)$,常用 L2 范式:
$$
R(W) = \sum_k \sum_l W_{k,l}^2
$$
也可用 L1 范式:
$$
R(W) = \sum_k \sum_l |W_{k,l}|
$$
L1 和 L2 也可组合:
$$
R(W) = \sum_k \sum_l \beta W_{k,l}^2 + |W_{k,l}|
$$
正则化的作用:对大数值权重进行惩罚,提升泛化能力,避免过拟合。通常只对权重 $W$ 正则化,不正则化偏置项 $b$。
多类 SVM 损失完整表达式
$$
L = \underbrace{\frac{1}{N} \sum_{i} L_i}{\text{data loss}} + \underbrace{\lambda R(W)}{\text{regularization loss}}
$$
与二元 SVM 的关系
二元 SVM 损失:
$$
L_i = C \max(0, 1 - y_i w^T x_i) + R(W)
$$
$C$ 与 $\lambda$ 成倒数关系。
Softmax分类器损失
Softmax 分类器是多项式逻辑回归(Multinomial Logistic Regression)。
损失函数
Softmax 函数:
$$
f_k(s) = \frac{e^{s_k}}{\sum_j e^{s_j}}
$$
真实分类标签的概率:
$$
P(Y = y_i | X = x_i) = \frac{e^{s_{y_i}}}{\sum_j e^{s_j}}
$$
损失函数(负对数似然):
$$
L_i = -\log P(Y = y_i | X = x_i) = -\log \left( \frac{e^{s_{y_i}}}{\sum_j e^{s_j}} \right)
$$
整个数据集的损失:
$$
L = \frac{1}{N} \sum_i \left[ -\log \left( \frac{e^{s_{y_i}}}{\sum_j e^{s_j}} \right) \right] + \lambda R(W)
$$
数值稳定性技巧:
$$
\frac{e^{s_{y_i}}}{\sum_j e^{s_j}} = \frac{e^{s_{y_i} + \log C}}{\sum_j e^{s_j + \log C}}
$$
通常取 $\log C = -\max_j s_j$,即将 $s$ 平移使最大值为0。
Softmax 和 SVM 比较
- SVM:鼓励正确类别分值比其他类别高出至少 $\Delta$。
- Softmax:鼓励正确分类的归一化对数概率变高,其余变低。
- SVM 损失是局部目标化,Softmax 损失永不满足。
- Softmax 输出概率分布,但其集中或离散程度由正则化参数 $\lambda$ 决定。
优化
损失函数可视化
损失函数一般定义在高维空间。可通过在1维或2维方向上切片,观察损失函数随参数变化的趋势。
对于单个样本:
$$
L_i = \sum_{j \neq y_i} \left[ \max(0, w_j^T x_i - w_{y_i}^T x_i + 1) \right]
$$
损失函数呈分段线性结构。
优化策略
随机搜索(Random search)
随机尝试不同的 $W$,取损失最小的。
随机本地搜索
从随机 $W$ 开始,生成随机扰动 $aW$,若损失变低则更新。
跟随梯度
计算损失函数的梯度(gradient),沿梯度负方向更新参数。
梯度计算
数值梯度法
利用定义近似计算梯度:
$$
\frac{df(x)}{dx} \approx \frac{f(x + h) - f(x)}{h}
$$
更精确的中心差分公式:
$$
\frac{df(x)}{dx} \approx \frac{f(x + h) - f(x - h)}{2h}
$$
数值梯度法实现简单但效率低,适合梯度检查。
解析梯度法
利用微分公式直接计算梯度,速度快但实现易出错。常与数值梯度法对比进行梯度检查。
以多类 SVM 数据损失为例:
$$
L_i = \sum_{j \neq y_i} \left[ \max(0, w_j^T x_i - w_{y_i}^T x_i + \Delta) \right]
$$
对 $w_{y_i}$ 微分:
$$
\nabla_{w_{y_i}} L_i = - \left( \sum_{j \neq y_i} \mathbb{1}(w_j^T x_i - w_{y_i}^T x_i + \Delta > 0) \right) x_i
$$
对 $w_j$ ($j \neq y_i$) 微分:
$$
\nabla_{w_j} L_i = \mathbb{1}(w_j^T x_i - w_{y_i}^T x_i + \Delta > 0) x_i
$$
梯度下降
Gradient Descent
普通梯度下降
1 | while True: |
小批量梯度下降
Mini-batch gradient descent
每次用小批量(如256个样本)计算梯度并更新参数。
1 | while True: |
极端情况:每批数据量为1,称为随机梯度下降(SGD)。
小批量大小一般为32、64、128等,通常不需交叉验证调参。
图像特征提取
直接输入原始像素效果不好,可先提取特征(如颜色直方图、词袋、边缘等),神经网络中特征由训练自动获得。
线性分类器可视化程序
线性分类器各种细节可在斯坦福大学开发的在线程序观看演示:点击这里
神经网络与反向传播
反向传播算法
神经网络的训练需要用到梯度下降等方法,核心在于反向传播(Backpropagation),它利用数学中的链式法则递归求解复杂函数的梯度。主流AI工具库(如TensorFlow、PyTorch)最核心的能力之一就是自动微分。
标量形式反向传播
引例
考虑函数
$$
f(x, y, z) = (x + y)z
$$
初值为 $x = -2, y = 5, z = -4$。
将其分解为两部分:
- $q = x + y$
- $f = qz$
分别计算梯度:
- $f$ 对 $q$ 的偏导:$\frac{\partial f}{\partial q} = z = -4$
- $f$ 对 $z$ 的偏导:$\frac{\partial f}{\partial z} = q = 3$
- $q$ 对 $x$ 的偏导:$\frac{\partial q}{\partial x} = 1$
- $q$ 对 $y$ 的偏导:$\frac{\partial q}{\partial y} = 1$
链式法则:
$$
\frac{\partial f}{\partial x} = \frac{\partial f}{\partial q} \cdot \frac{\partial q}{\partial x} = -4 \cdot 1 = -4 \
\frac{\partial f}{\partial y} = \frac{\partial f}{\partial q} \cdot \frac{\partial q}{\partial y} = -4 \cdot 1 = -4 \
\frac{\partial f}{\partial z} = q = 3
$$
前向传播:从输入到输出计算数值。
反向传播:从输出递归地向前计算梯度。
Python实现:
1 | # 设置输入值 |
直观理解反向传播
- 每个门单元(如加法、乘法)在前向传播时只需计算自己的输出和局部梯度。
- 在反向传播时,门单元获得整个网络输出对自己输出的梯度,然后用链式法则乘以自己的局部梯度,得到对输入的梯度,并继续向前传递。
加法门、乘法门和max门
加法门:$f(x, y) = x + y \implies \frac{\partial f}{\partial x} = 1, \frac{\partial f}{\partial y} = 1$
乘法门:$f(x, y) = xy \implies \frac{\partial f}{\partial x} = y, \frac{\partial f}{\partial y} = x$
max门:
$$
f(x, y) = \max(x, y) \
\frac{\partial f}{\partial x} = \mathbb{1}(x \geq y) \
\frac{\partial f}{\partial y} = \mathbb{1}(y \geq x)
$$加法门是梯度分配器,输入梯度等于输出梯度。
乘法门是梯度转换器,输入梯度等于输出梯度乘以另一个输入值。
max门是梯度路由器,较大输入的梯度等于输出梯度,较小输入的梯度为0。
复杂示例
考虑
$$
f(w, x) = \frac{1}{1 + e^{-(w_0 x_0 + w_1 x_1 + w_2)}}
$$
常用门单元及其导数:
- 倒数门:$f(x) = \frac{1}{x} \implies \frac{df}{dx} = -\frac{1}{x^2}$
- 加法门:$f_c(x) = c + x \implies \frac{df}{dx} = 1$
- 指数门:$f(x) = e^x \implies \frac{df}{dx} = e^x$
- 乘法门:$f_a(x) = ax \implies \frac{df}{dx} = a$
sigmoid门单元:
$$
\sigma(x) = \frac{1}{1 + e^{-x}} \
\frac{d\sigma(x)}{dx} = (1 - \sigma(x))\sigma(x)
$$
Python实现:
1 | # 假设一些随机数据和权重 |
分段计算示例
$$
f(x, y) = \frac{x + \sigma(y)}{\sigma(x) + (x + y)^2}
$$
前向传播:
1 | x = 3 |
反向传播:
1 | # 回传 f = num * invden |
注意:
- 前向传播变量要缓存,反向传播时用到。
- 变量多次出现时,反向传播要用
+=累加梯度。
多元链式法则:
$$
\frac{\partial f}{\partial x} = \sum_{q_i} \frac{\partial f}{\partial q_i} \frac{\partial q_i}{\partial x}
$$
实际应用
计算图主类结构:
1 | class ComputationalGraph(object): |
门单元类示例(乘法门):
1 | class MultiplyGate(object): |
向量形式反向传播
考虑如下例子:
$$
f(x, W) = |W x|^2 = \sum_{i=1}^n (W x)_i^2
$$
其中 $x$ 是 $n$ 维向量,$W$ 是 $n \times n$ 矩阵。
设 $q = W x$,则
$$
\frac{\partial f}{\partial q_i} = 2q_i \implies \frac{\partial f}{\partial q} = 2q \
\frac{\partial q_k}{\partial W_{i, j}} = \mathbb{1}{i=k} x_j \implies \frac{\partial f}{\partial W{i, j}} = 2q_i x_j \implies \frac{\partial f}{\partial W} = 2q x^T \
\frac{\partial q_k}{\partial x_i} = W_{k, i} \implies \frac{\partial f}{\partial x_i} = \sum_{k=1}^n 2q_k W_{k, i} \implies \frac{\partial f}{\partial x} = 2W^T q
$$
Python实现:
1 | import numpy as np |
注意:
- 权重的梯度 $dW$ 的尺寸与 $W$ 一致。
- 最终损失函数是标量,每个门单元的输入梯度与原输入形状相同。
神经网络简介
神经网络算法介绍
线性分类器:
$$
s = W x
$$
其中 $W$ 是 $[10 \times 3072]$,$x$ 是 $[3072 \times 1]$。
两层神经网络:
$$
s = W_2 \max(0, W_1 x)
$$
- $W_1$ 例:$[100 \times 3072]$,将图像转为100维向量。
- $\max(0, -)$ 是ReLU激活函数。
- $W_2$:$[10 \times 100]$,输出10个分类评分。
注意: 非线性函数是神经网络表达能力的关键。
三层神经网络:
$$
s = W_3 \max(0, W_2 \max(0, W_1 x))
$$
两层神经网络代码示例(中间层用sigmoid):
1 | import numpy as np |
神经网络与真实神经对比
- 神经元(neuron)是大脑的基本计算单位。
- 数学模型:输入信号 $x_0$ 乘以权重 $w_0$,所有输入加权求和后加偏置,经过激活函数 $f$ 输出。
激活函数常用sigmoid:
$$
f(x) = \frac{1}{1 + e^{-x}}
$$
代码示例:
1 | class Neuron: |
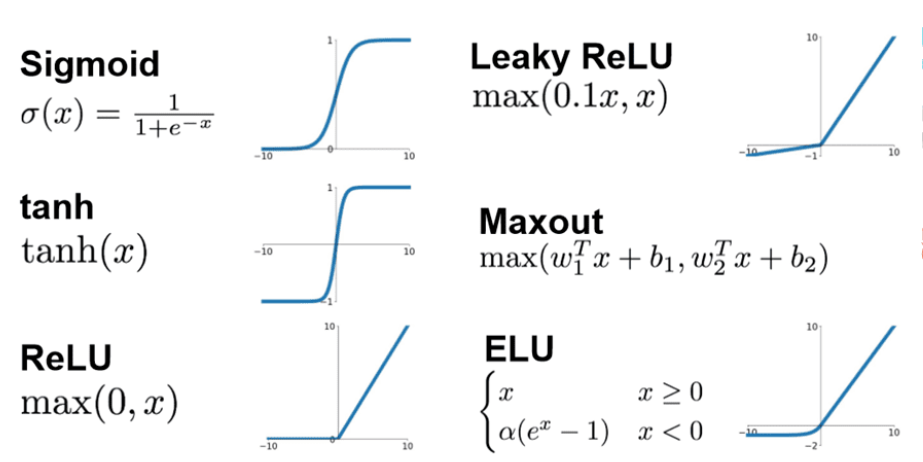
常用激活函数
- Sigmoid: $f(x) = \frac{1}{1 + e^{-x}}$
- Tanh: $f(x) = \tanh(x)$
- ReLU: $f(x) = \max(0, x)$
- Leaky ReLU, ELU, Softplus等
| 激活函数 | 函数表达式 | 值域 | 零均值 | 梯度消失 | 计算成本 | 稀疏性 | 神经元死亡 | 平滑性 | 主要优点 | 主要缺点 | 典型场景 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sigmoid | $\frac{1}{1+e^{-x}}$ | (0,1) | ❌ | ✅ 两端饱和 | 高 | ❌ | ❌ | ✅ | 平滑、概率解释 | 梯度消失、非零均值 | 二分类输出层 |
| Tanh | $\frac{e^x-e^{-x}}{e^x+e^{-x}}$ | (-1,1) | ✅ | ✅ 两端饱和 | 高 | ❌ | ❌ | ✅ | 零均值、比Sigmoid收敛快 | 梯度消失 | RNN/LSTM内部 |
| ReLU | $ max(0,x)$ | [0,+∞) | ❌ | ❌ 正区间不饱和 | 极低 | ✅ | ✅ | ❌ | 计算快、缓解梯度消失 | 神经元死亡 | CNN隐藏层 |
| Leaky ReLU | $\max(\alpha x,x),\ \alpha \text{≈0.01}$ | (-∞,+∞) | ❌ | ❌ | 低 | ✅ | ❌ | ❌ | 解决神经元死亡 | α需调参、非零均值 | 通用替代ReLU |
神经网络结构
最常见的结构是全连接层(fully-connected layer),即每层神经元与前后层完全连接,无循环。
- $N$层神经网络不计输入层。
- 参数量 = 权重数 + 偏置数。
例:
- 2层网络,隐层4个神经元,输出层2个神经元,输入层3个神经元(输入维度)。
- 神经元数:$4+2=6$
- 权重数:$[3 \times 4] + [4 \times 2] = 20$
- 偏置数:$4+2=6$
- 总参数:$26$
- 3层网络,两个隐层各4个神经元,输出层1个神经元。
- 神经元数:$4+4+1=9$
- 权重数:$[3 \times 4] + [4 \times 4] + [4 \times 1] = 32$
- 偏置数:$4+4+1=9$
- 总参数:$41$
现代卷积神经网络可达上亿参数、上百层。
三层神经网络代码示例
1 | import numpy as np |
- $W_1$:$[4 \times 3]$,$b_1$:$[4 \times 1]$
- $W_2$:$[4 \times 4]$,$b_2$:$[4 \times 1]$
- $W_3$:$[1 \times 4]$,$b_3$:标量
注意: 最后一层通常无激活函数。
理解神经网络
- 神经网络定义了一系列函数族,权重为参数。
- 至少一个隐层的神经网络是通用近似器,可近似任意连续函数。
- 实践中,3层神经网络优于2层,但继续加深(4、5、6层)提升有限。卷积神经网络则深度越大效果越好。