


监督学习(Supervised Learning):训练集有标记信息,学习方式有分类和回归。
监督学习的数学原理
- 问题定义
- 输入空间:$X \in \mathbb{R}^n$,n维特征向量
- 输出空间:$Y$,回归问题 $Y \in \mathbb{R}$,分类问题 $Y \in {0,1}$
- 训练集:$D = {(x_i, y_i)}{i=1}^N$
损失函数
- 定义:损失函数用于衡量模型预测值与真实值之间的差距
- 常见损失函数:
- 回归问题:
- 均方误差(MSE):$L(y, \hat{y}) = \frac{1}{2}(y - \hat{y})^2$
- 平均绝对误差(MAE):$L(y, \hat{y}) = |y - \hat{y}|$
- 分类问题:
- 对数损失:$L(y, \hat{y}) = -y\log(\hat{y}) - (1-y)\log(1-\hat{y})$
- 交叉熵损失:$L(y, \hat{y}) = -\sum_{i=1}^C y_i\log(\hat{y}_i)$
- 回归问题:
- 特点:
- 可导性:损失函数需要可导,便于计算梯度
- 凸性:通常选择凸函数,保证优化过程收敛
- 可加性:支持样本级别的损失累加
目标函数
总体目标函数:$Obj(\Theta) = L(\Theta) + \Omega(\Theta)$
- $L(\Theta)$:训练损失函数,衡量模型预测值与真实值的差距
- $\Omega(\Theta)$:正则化项,控制模型复杂度
- 同时有这两项的意义:在保证模型预测准确性的同时,控制模型复杂度,防止过拟合
第t次迭代的目标函数:
$Obj^{(t)} = \sum_{i=1}^n l(y_i, \hat{y}_i^{(t-1)} + f_t(x_i)) + \Omega(f_t)$- $\hat{y}_i^{(t-1)}$:前t-1棵树的预测结果
- $f_t(x_i)$:第t棵树的预测结果
- 意义:每次迭代都优化当前树的预测结果,同时考虑模型复杂度
正则化项
- 树的复杂度定义:
$\Omega(f_t) = \gamma T + \frac{1}{2}\lambda \sum_{j=1}^T w_j^2$- $T$:叶子节点个数,控制树的深度
- $w_j$:第j个叶子节点的权重,控制节点预测值
- $\gamma, \lambda$:控制正则化强度的超参数
- 意义:
- 控制树的生长,防止过拟合
- 平衡模型的复杂度和预测能力
- 提高模型的泛化能力
- 树的复杂度定义:
逻辑回归
逻辑回归是一种用于分类的监督学习算法,尽管名称中有”回归”二字,但它主要用于解决分类问题。逻辑回归基于逻辑函数(即Sigmoid函数)将线性回归的输出映射到(0,1)区间,表示事件发生的概率。
原理
逻辑回归的模型可以表示为:$P(y=1∣x)=σ(β_0+β_1x_1+β_2x_2+⋯+β_nx_n)$,其中,σ(z)= $\frac{1}{1+e^{-z}}$ 是Sigmoid函数,将线性组合的输出映射到(0,1)区间,表示事件发生的概率。逻辑回归通过最大似然估计来估计模型参数,目标是找到一组参数 β ,使得模型对训练数据的预测概率与实际结果尽可能一致。
损失函数
逻辑回归的损失函数采用对数似然损失函数(Log Loss),其表达式为:$J(β)=- \frac{1}{m} ∑_{i=1}^m [y_i ln(\hat{y}_i)+(1−y_i)ln(1−\hat{y}_i)]$,其中,m 是样本数量,$y_i$ 是真实标签(0或1),$\hat{y}_i =P(y=1∣x_i)$ 是模型预测的概率。通过最小化这个损失函数,可以得到最优的模型参数 β。
核心思想
逻辑回归是线性回归的一种扩展,用来处理分类问题。其核心思想是:
- 先用线性函数拟合数据
- 通过Sigmoid函数将线性输出压缩到(0,1)区间
- 将压缩后的值解释为概率
- 线性回归:输出连续值,无法限定范围
- 逻辑回归:通过Sigmoid函数将输出映射到(0,1)区间
- Sigmoid函数:$σ(z) = \frac{1}{1+e^{-z}}$
- 输出范围:(0,1)
- 当z趋近于正无穷时,σ(z)趋近于1
- 当z趋近于负无穷时,σ(z)趋近于0
- 当z=0时,σ(z)=0.5
决策边界
决策边界是分类器对样本进行区分的边界,分为:
线性决策边界:
- 形式:$θ_0 + θ_1x_1 + θ_2x_2 = 0$
- 特点:直线或超平面
- 适用:线性可分数据
非线性决策边界:
- 形式:通过多项式特征实现
- 特点:曲线或曲面
- 适用:线性不可分数据
特点
- 输出结果为概率值:逻辑回归的输出是一个概率值,表示样本属于正类的概率。
- 适用于二分类问题:逻辑回归主要用于解决二分类问题。
- 对数据分布要求相对宽松:不假设自变量和因变量之间具有线性关系,也不要求残差服从正态分布。
- 模型的可解释性强:模型的参数具有明确的统计意义。
优点
- 简单易懂:模型结构相对简单,易于理解和实现。
- 计算效率高:训练过程通常采用梯度下降法或其变种,计算效率高。
- 可解释性强:参数具有明确的统计意义,可直观地解释每个自变量对目标变量的影响。
- 适用于高维数据:对高维数据具有较好的适应性。
缺点
- 仅适用于线性可分问题:本质上是一种线性分类模型,对非线性问题分类性能可能较差。
- 易受多重共线性影响:自变量之间存在严重的多重共线性时,参数估计可能会变得不稳定。
- 对异常值敏感:异常值可能会对模型的参数估计产生较大影响。
- 无法处理复杂的特征交互:默认不考虑特征之间的交互作用。
模型优化
- 特征工程:特征选择、特征构造、特征缩放、处理缺失值等。
- 正则化:L1正则化、L2正则化、弹性网络正则化等。
- 优化算法:梯度下降法、牛顿法、拟牛顿法等。
- 模型评估与选择:评估指标包括准确率、精确率、召回率、F1分数、ROC曲线和AUC值等,交叉验证方法如k折交叉验证、留一法交叉验证等。
正则化
L2正则化:
- 形式:$J(θ) = J(θ) + \frac{λ}{2m}\sum_{j=1}^nθ_j^2$
- 作用:限制参数大小
- 效果:防止过拟合
L1正则化:
- 形式:$J(θ) = J(θ) + \frac{λ}{m}\sum_{j=1}^n|θ_j|$
- 作用:产生稀疏解
- 效果:特征选择
特征工程
多项式特征:
- 增加特征维度
- 捕捉特征间关系
- 实现非线性切分
特征变换:
- 标准化
- 归一化
- 特征选择
梯度下降优化
梯度下降原理:
- 向函数梯度反方向迭代
- 逐步减小损失函数值
- 最终找到最优参数
学习率选择:
- 太大:可能错过最优解
- 太小:收敛速度慢
- 需要根据具体问题调整
代码实现
1 | from sklearn.linear_model import LogisticRegression |
K近邻算法
K近邻算法(K-Nearest Neighbors,KNN)是一种基本的分类和回归方法。它的核心思想是:一个样本的类别由它最接近的K个邻居(K为正整数,通常较小)的多数类别决定。
原理
K近邻居法采用向量空间模型来分类(本质是划分特征空间),概念为相同类别的案例,彼此的相似度高。而可以借由计算与已知类别案例之相似度,来评估未知类别案例可能的分类。
KNN算法的工作原理是:
- 存在一个样本数据集合(训练集),每个数据都有标签
- 输入没有标签的新数据后,将新数据的每个特征与训练集中数据对应的特征进行比较
- 提取训练集中特征最相似数据(最近邻)的分类标签
- 选择K个最相似数据中出现次数最多的分类,作为新数据的分类
核心要素
距离度量准则
曼哈顿距离(L1距离):
- 公式:$d(x,y) = \sum_{i=1}^n |x_i - y_i|$
- 特点:计算速度快,对异常值不敏感
- 适用:特征差异较大时
欧氏距离(L2距离):
- 公式:$d(x,y) = \sqrt{\sum_{i=1}^n (x_i - y_i)^2}$
- 特点:最常用的距离度量方式
- 适用:特征差异较小时
切比雪夫距离:
- 公式:$d(x,y) = \max_{i=1}^n |x_i - y_i|$
- 特点:只考虑最大维度差异
- 适用:特征差异显著时
K值的选择
K值较小:
- 模型复杂,容易过拟合
- 易受噪声影响
- 决策边界更复杂
- 适合:数据噪声小,类别边界清晰
K值较大:
- 模型简单,可能欠拟合
- 能够减小噪声的影响
- 类别之间的界限变得模糊
- 适合:数据噪声大,类别边界模糊
选择方法:
- 交叉验证
- 网格搜索
- 经验法则:K通常取奇数,避免平票
- 一般K值不超过训练样本数的平方根
特点
优点
精度高:
- 理论成熟,思想简单
- 基于实例的学习,不需要训练过程
- 对数据分布没有假设
对异常值不敏感:
- 基于距离度量,对异常值有较好的鲁棒性
- 通过K个邻居投票,减少单个异常值的影响
无数据输入假定:
- 不需要对数据分布做假设
- 适用于各种类型的数据
可用于分类和回归:
- 分类:通过投票实现
- 回归:通过平均实现
缺点
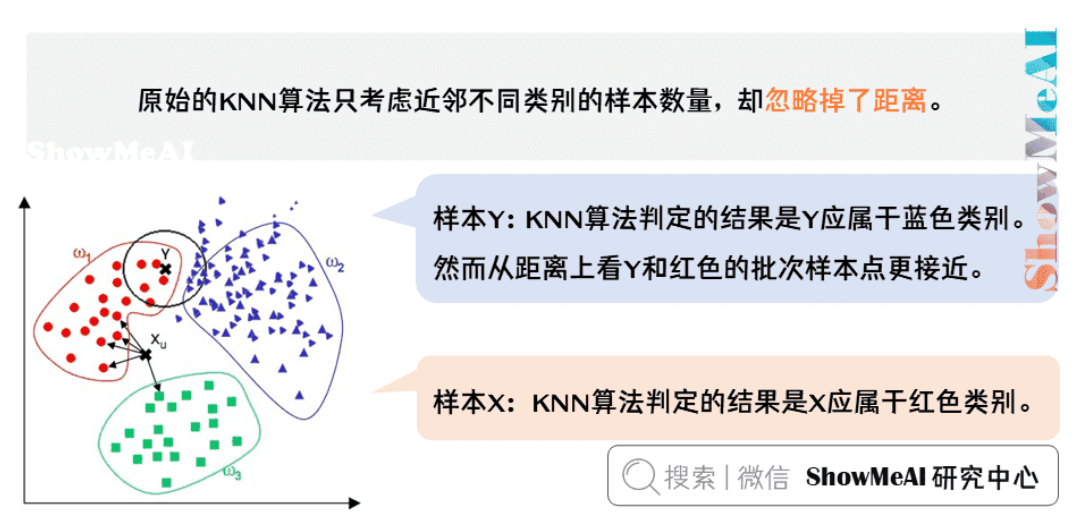
对噪声数据过于敏感:
- 当不同类别的样本距离相等时,无法准确判断
- 例如:一个蓝点和两个红点到绿点的距离相等,无法确定绿点的类别
计算复杂度高:
- 需要计算待分类样本与所有训练样本的距离
- 时间复杂度:O(n),n为训练样本数
- 预测时间随训练集增大而线性增长
空间复杂度高:
- 需要存储所有训练样本
- 空间复杂度:O(n),n为训练样本数
- 对大规模数据集不友好
样本库容量依赖性:
- 对训练样本数量和质量要求较高
- 需要足够的样本覆盖特征空间
- 样本分布不均匀时效果差
模型优化
距离度量优化
特征标准化:
- 消除特征尺度差异
- 使用Z-score标准化
- 使用Min-Max归一化
特征权重调整:
- 根据特征重要性赋予权重
- 使用互信息选择特征
- 使用特征选择算法
距离度量方式选择:
- 根据数据特点选择合适距离度量
- 可以自定义距离度量函数
- 考虑特征之间的相关性
样本库优化
样本编辑:
- 删除冗余样本
- 删除噪声样本
- 保留边界样本
样本压缩:
- 保留代表性样本
- 使用聚类中心
- 使用原型选择
样本维护:
- 动态更新样本库
- 增量学习
- 在线学习
搜索优化
KD树:
- 将特征空间划分为超矩形区域
- 减少距离计算次数
- 适合低维数据
球树:
- 将特征空间划分为超球体
- 比KD树更高效
- 适合高维数据
局部敏感哈希:
- 将相似样本映射到相同桶
- 快速找到近邻
- 适合大规模数据
代码实现
1 | from sklearn.neighbors import KNeighborsClassifier |
朴素贝叶斯
朴素贝叶斯是一种基于贝叶斯定理的分类算法。”朴素”的意思是假设特征之间相互独立。与其他分类算法(如KNN、逻辑回归、决策树等)不同,朴素贝叶斯是一种生成方法,它直接学习特征和类别的联合分布,而不是直接学习决策函数或条件分布。
原理
朴素贝叶斯算法的核心思想是通过考虑特征概率来预测分类。对于给定的待分类样本,计算在此样本出现的条件下各个类别出现的概率,选择概率最大的类别作为预测结果。
贝叶斯公式
朴素贝叶斯基于贝叶斯定理:
$P(y|x) = \frac{P(x|y)P(y)}{P(x)}$
其中:
- $P(y|x)$ 是后验概率,表示在特征x出现的条件下类别y的概率
- $P(x|y)$ 是似然概率,表示在类别y的条件下特征x出现的概率
- $P(y)$ 是先验概率,表示类别y的概率
- $P(x)$ 是特征x的概率
条件独立假设
朴素贝叶斯假设所有特征之间相互独立,因此:
$P(x|y) = P(x_1|y)P(x_2|y)…P(x_n|y)$
分类决策
对于给定的样本x,计算每个类别y的后验概率:
$P(y|x) = \frac{P(x|y)P(y)}{P(x)} = \frac{P(y)\prod_{i=1}^n P(x_i|y)}{P(x)}$
由于$P(x)$对所有类别都是相同的,因此可以简化为:
$P(y|x) \propto P(y)\prod_{i=1}^n P(x_i|y)$
最终选择后验概率最大的类别作为预测结果:
$y^* = \arg\max_y P(y|x)$
核心要素
先验概率与后验概率
先验概率:事件发生前的预判概率
- 基于历史数据统计:例如,在垃圾邮件分类中,根据历史数据统计垃圾邮件占总邮件的比例
- 公式:$P(y) = \frac{N_y}{N}$,其中$N_y$是类别y的样本数,$N$是总样本数
- 基于背景常识:例如,在疾病诊断中,根据人群患病率估计
- 公式:$P(y) = \frac{\text{患病人数}}{\text{总人数}}$
- 基于主观观点:例如,在风险评估中,根据专家经验判断
- 公式:$P(y) = \text{专家评估概率}$
- 基于历史数据统计:例如,在垃圾邮件分类中,根据历史数据统计垃圾邮件占总邮件的比例
后验概率:事件发生后的反向条件概率
- 基于先验概率求得:通过贝叶斯公式计算
- 公式:$P(y|x) = \frac{P(x|y)P(y)}{P(x)}$
- 用于最终分类决策:选择后验概率最大的类别
- 公式:$y^* = \arg\max_y P(y|x)$
- 基于先验概率求得:通过贝叶斯公式计算
条件概率计算
离散特征:
多项式朴素贝叶斯:
- 适用于文本分类
- 考虑词频信息
- 例如:在垃圾邮件分类中,统计每个词在垃圾邮件和正常邮件中出现的频率
- 公式:$P(x_i|y) = \frac{N_{yi} + \alpha}{N_y + \alpha N}$,其中$N_{yi}$是特征$x_i$在类别y中出现的次数,$N_y$是类别y的样本数,$\alpha$是平滑参数
伯努利朴素贝叶斯:
- 适用于二值特征
- 只考虑特征是否出现
- 例如:在文本分类中,只考虑词是否出现,不考虑出现次数
- 公式:$P(x_i|y) = \frac{N_{yi} + \alpha}{N_y + 2\alpha}$,其中$N_{yi}$是特征$x_i$在类别y中出现的样本数
连续特征:
- 高斯朴素贝叶斯:
- 假设特征服从正态分布
- 需要计算均值和方差
- 例如:在身高预测中,假设身高服从正态分布,计算不同类别的身高均值和方差
- 公式:$P(x_i|y) = \frac{1}{\sqrt{2\pi\sigma_{yi}^2}} \exp\left(-\frac{(x_i - \mu_{yi})^2}{2\sigma_{yi}^2}\right)$,其中$\mu_{yi}$和$\sigma_{yi}^2$分别是类别y下特征$x_i$的均值和方差
- 高斯朴素贝叶斯:
特点
优点
简单高效:
- 训练和预测速度快:时间复杂度为O(n),n为特征数
- 实现简单:只需要计算概率,不需要复杂的优化
- 内存占用小:只需要存储概率表
对小规模数据表现好:
- 能处理多分类问题:可以计算多个类别的概率
- 对缺失数据不敏感:可以通过概率计算处理缺失值
- 适合增量学习:可以动态更新概率表
理论基础扎实:
- 基于概率论:有严格的数学推导
- 可解释性强:可以解释每个特征对分类的贡献
- 预测结果有概率意义:可以给出分类的置信度
缺点
特征独立性假设:
- 实际中特征往往相关:例如,在文本分类中,某些词经常一起出现
- 可能影响分类效果:当特征相关性强时,分类效果会下降
- 需要特征选择:去除相关特征,提高独立性
对输入数据敏感:
- 需要特征预处理:标准化、归一化等
- 对异常值敏感:异常值会影响概率计算
- 需要处理零概率问题:使用平滑技术
模型优化
平滑处理
原因:使用朴素贝叶斯,有时候会面临零概率问题。
在计算实例的概率时,如果某个量在观察样本库(训练集)中没有出现过,会导致整个实例的概率结果是0。
eg:在文本分类的问题中,当「一个词语没有在训练样本中出现」时,这个词基于公式统计计算得到的条件概率为 0,使用连乘计算文本出现概率时也为 。这是不合理的,不能因为一个事件没有观察到就武断的认为该事件的概率是 0。
拉普拉斯平滑:
- 解决零概率问题:当某个特征在某个类别中没有出现时,概率为0
- 公式:$P(x_i|y) = \frac{N_{yi} + \alpha}{N_y + \alpha N}$,其中$\alpha$是平滑参数
- $\alpha$为平滑参数:通常取1,可以根据实际情况调整
- 例如:在文本分类中,当某个词在某个类别中没有出现时,使用平滑后的概率
特征工程
特征选择:
- 去除无关特征:使用信息增益、卡方检验等方法
- 信息增益:$IG(x_i) = H(y) - H(y|x_i)$,其中$H(y)$是类别熵,$H(y|x_i)$是条件熵
- 卡方检验:$\chi^2(x_i) = \sum_{y} \frac{(O_{yi} - E_{yi})^2}{E_{yi}}$,其中$O_{yi}$是观察值,$E_{yi}$是期望值
- 选择重要特征:保留对分类贡献大的特征
- 降低特征维度:使用PCA、LDA等方法
- 去除无关特征:使用信息增益、卡方检验等方法
特征转换:
- 离散化连续特征:将连续特征转换为离散特征
- 标准化特征值:使特征值在相同尺度上
- 公式:$x_i’ = \frac{x_i - \mu_i}{\sigma_i}$,其中$\mu_i$和$\sigma_i$分别是特征$x_i$的均值和标准差
- 处理缺失值:使用均值、中位数等填充
模型选择
多项式模型:
- 适用于文本分类:考虑词频信息
- 适合长文本:可以处理大量特征
- 例如:垃圾邮件分类、新闻分类等
伯努利模型:
- 适用于短文本:只考虑词是否出现
- 适合二值特征:特征只有0和1两种取值
- 例如:情感分析、主题分类等
高斯模型:
- 适用于连续特征:假设特征服从正态分布
- 需要计算均值和方差:对每个类别的每个特征计算
- 例如:身高预测、体重预测等
代码实现
1 | from sklearn.naive_bayes import MultinomialNB, GaussianNB, BernoulliNB |
支持向量机
支持向量机(Support Vector Machine, SVM)是一种强大的监督学习算法,主要用于分类和回归问题。它的核心思想是在特征空间中找到一个最优的超平面,使得不同类别的样本被最大间隔分开。
分类
支持向量机学习方法,针对不同的情况,有由简至繁的不同模型: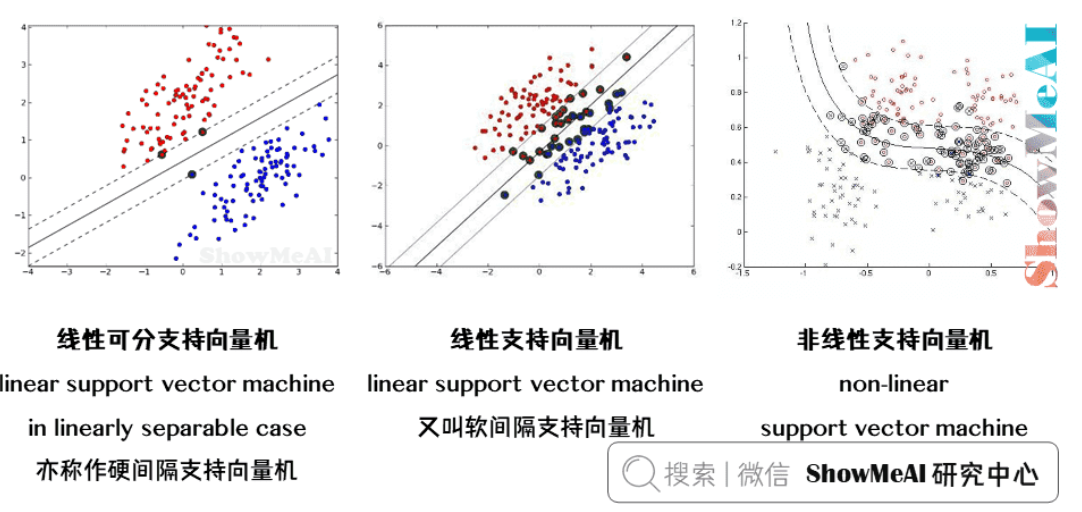
线性可分支持向量机
linear support vector machine in linearly separable case
训练数据线性可分的情况下,通过硬间隔最大化(hard margin maximization),学习一个线性的分类器,即线性可分支持向量机(亦称作硬间隔支持向量机)。
线性支持向量机
linear support vector machine
训练数据近似线性可分的情况下,通过软间隔最大化(soft margin maximization),学习一个线性的分类器,称作线性支持向量机(又叫软间隔支持向量机)。
非线性支持向量机
non-linear support vector machine
训练数据线性不可分的情况下,通过使用核技巧(kernel trick)及软间隔最大化,学习非线性分类器,称作非线性支持向量机。
原理
SVM的基本原理是通过寻找一个最优的超平面来划分不同类别的样本。这个超平面不仅要能够正确分类样本,还要使得不同类别之间的间隔最大化。
最大间隔分类器
分类问题与线性模型
- 分类问题是监督学习的核心问题之一
- 当输出变量取有限个离散值时,预测问题便成为分类问题
- 分类问题的数学本质是空间划分,寻找不同类别的决策边界
- 对于二分类问题,目标是找到一个超平面$w \cdot x + b = 0$,使得:
- 对于正类样本:$w \cdot x + b > 0$
- 对于负类样本:$w \cdot x + b < 0$
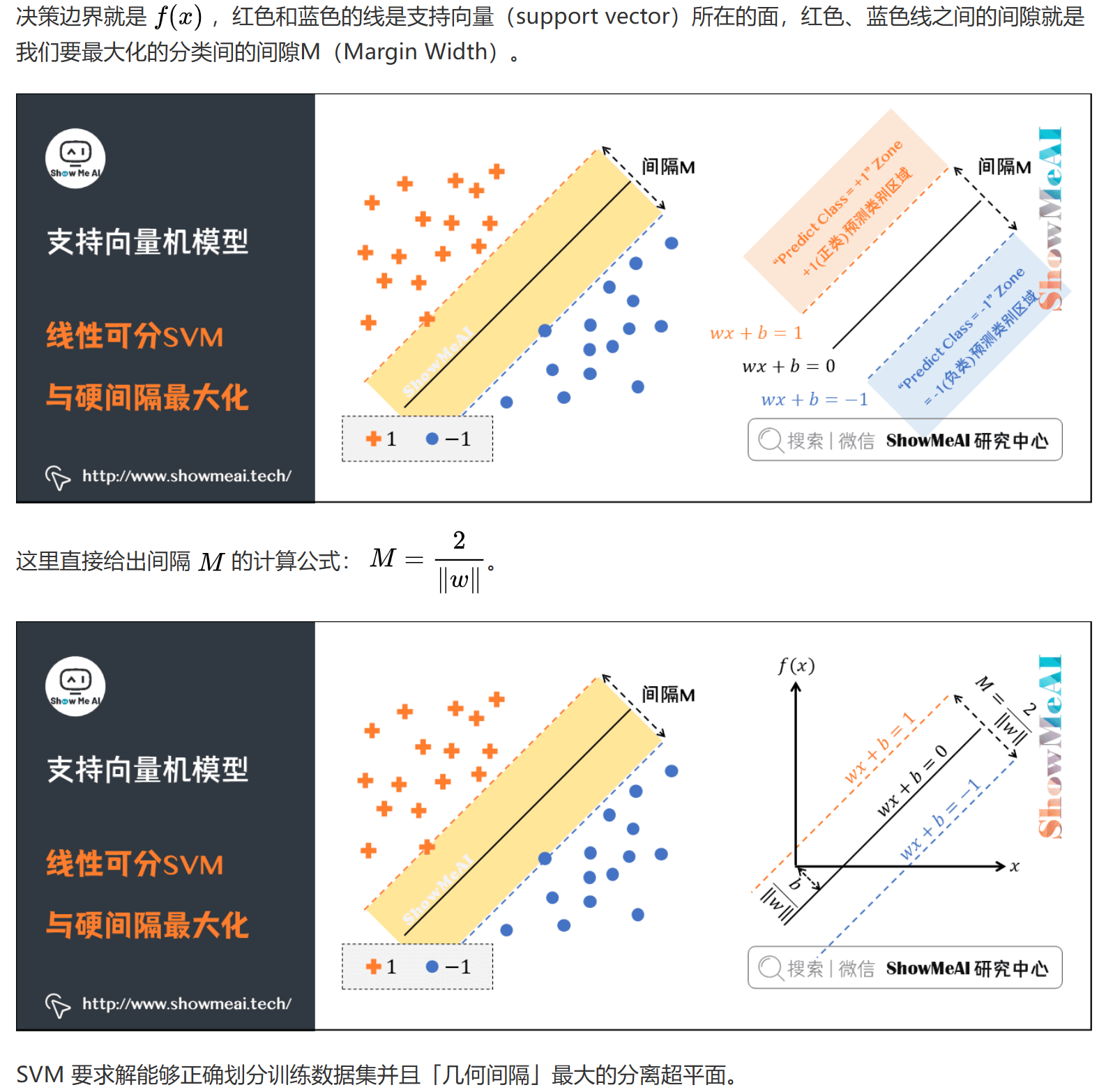
最大间隔原则
- SVM不仅希望把两类样本点区分开,还希望找到鲁棒性最高、稳定性最好的决策边界
- 决策边界与两侧”最近”的数据点有着”最大”的距离
- 这样的决策边界具有最强的容错性,不容易受到噪声数据的干扰
- 支持向量:距离决策边界最近的样本点,它们决定了决策边界的位置
硬间隔最大化
几何间隔
- 对于给定的数据集$T = {(x_1,y_1),(x_2,y_2),…,(x_N,y_N)}$和超平面$(w,b)$
- 定义超平面关于样本点$(x_i,y_i)$的几何间隔为:
$\gamma_i = y_i(\frac{w}{||w||} \cdot x_i + \frac{b}{||w||})$ - 超平面关于所有样本点的几何间隔的最小值为:
$\gamma = \min_{i=1,…,N} \gamma_i$ - 函数间隔:$\hat{\gamma}_i = y_i(w \cdot x_i + b)$
- 几何间隔与函数间隔的关系:$\gamma_i = \frac{\hat{\gamma}_i}{||w||}$
最优化问题
- 目标函数:$\max_{w,b} \gamma$
- 约束条件:$y_i(w \cdot x_i + b) \geq \gamma, i=1,2,…,N$
- 等价于:$\min_{w,b} \frac{1}{2}||w||^2$
- 约束条件:$y_i(w \cdot x_i + b) \geq 1, i=1,2,…,N$
- 拉格朗日函数:
$L(w,b,\alpha) = \frac{1}{2}||w||^2 - \sum_{i=1}^N \alpha_i[y_i(w \cdot x_i + b) - 1]$ - KKT条件:
- $\nabla_w L(w,b,\alpha) = w - \sum_{i=1}^N \alpha_i y_i x_i = 0$
- $\nabla_b L(w,b,\alpha) = -\sum_{i=1}^N \alpha_i y_i = 0$
- $\alpha_i \geq 0, i=1,2,…,N$
- $y_i(w \cdot x_i + b) - 1 \geq 0, i=1,2,…,N$
- $\alpha_i[y_i(w \cdot x_i + b) - 1] = 0, i=1,2,…,N$
对偶算法
- 对于给定得线性可分训练数据集,可以首先求对偶问题的解 $\alpha^\star$ ;再利用公式求得原始问题的解 $w^\star$、$b^\star$ ;从而得到分离超平面及分类决策函数。这种算法称为线性可分支持向量机的对偶学习算法,是线性可分支持向量机学习的基本算法。
- 构建拉格朗日函数:
$L(w,b,\alpha) = \frac{1}{2}||w||^2 - \sum_{i=1}^N \alpha_i[y_i(w \cdot x_i + b) - 1]$ - 对偶问题:
$\max_{\alpha} \sum_{i=1}^N \alpha_i - \frac{1}{2}\sum_{i=1}^N\sum_{j=1}^N \alpha_i\alpha_jy_iy_j(x_i \cdot x_j)$ - 约束条件:
- $\sum_{i=1}^N \alpha_iy_i = 0$
- $\alpha_i \geq 0, i=1,2,…,N$
- 最优解:
- $w^\star = \sum_{i=1}^N \alpha_i^\star y_ix_i$
- $b^\star = y_j - \sum_{i=1}^N \alpha_i^\star y_i(x_i \cdot x_j)$ 其中$j$是满足 $0 < \alpha_j^\star < C$ 的任意下标
软间隔最大化
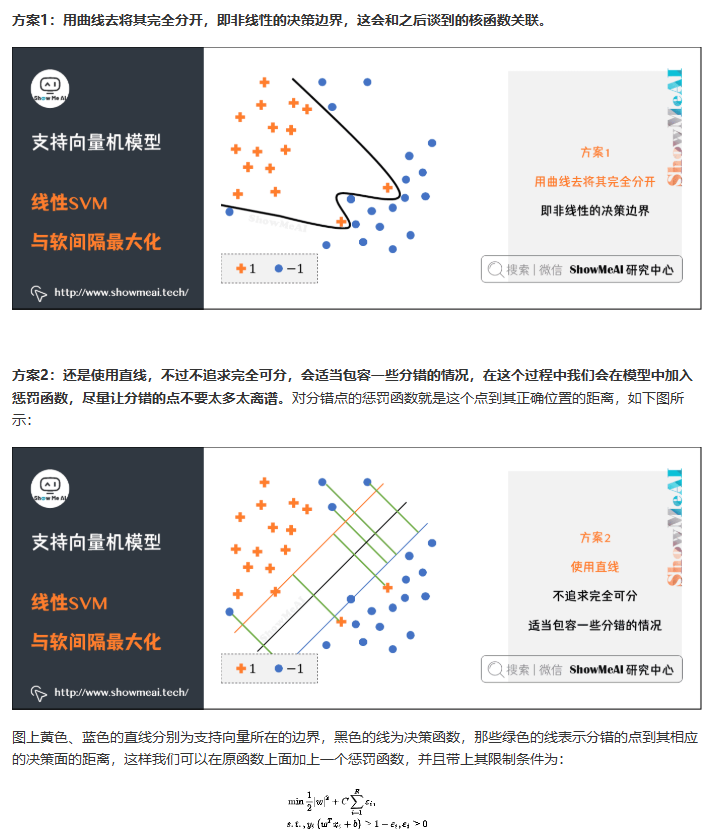
软间隔
- 引入松弛变量$\xi_i \geq 0$
- 目标函数:$\min_{w,b,\xi} \frac{1}{2}||w||^2 + C\sum_{i=1}^N \xi_i$
- 约束条件:
- $y_i(w \cdot x_i + b) \geq 1 - \xi_i, i=1,2,…,N$
- $\xi_i \geq 0, i=1,2,…,N$
- 拉格朗日函数:
$L(w,b,\xi,\alpha,\mu) = \frac{1}{2}||w||^2 + C\sum_{i=1}^N \xi_i - \sum_{i=1}^N \alpha_i[y_i(w \cdot x_i + b) - 1 + \xi_i] - \sum_{i=1}^N \mu_i\xi_i$ - KKT条件:
- $\nabla_w L = w - \sum_{i=1}^N \alpha_i y_i x_i = 0$
- $\nabla_b L = -\sum_{i=1}^N \alpha_i y_i = 0$
- $\nabla_{\xi_i} L = C - \alpha_i - \mu_i = 0$
- $\alpha_i \geq 0, \mu_i \geq 0, i=1,2,…,N$
- $y_i(w \cdot x_i + b) - 1 + \xi_i \geq 0, i=1,2,…,N$
- $\alpha_i[y_i(w \cdot x_i + b) - 1 + \xi_i] = 0, i=1,2,…,N$
- $\mu_i\xi_i = 0, i=1,2,…,N$
惩罚参数C
- C值越大,对误分类的惩罚越大
- C值越小,对误分类的惩罚越小
- 需要根据具体问题选择合适的C值
- 当$C \to \infty$时,软间隔SVM退化为硬间隔SVM
- 当$C \to 0$时,允许更多的误分类,决策边界更简单
核函数与核技巧
支持向量机可以借助核技巧完成复杂场景下的非线性分类,当输入空间为欧式空间或离散集合、特征空间为希尔贝特空间时,核函数(kernel function) 表示将输入从输入空间映射到特征空间得到的特征向量之间的内积。
核技巧:通过使用核函数可以学习非线性支持向量机,等价于隐式地在高维的特征空间中学习线性支持向量机。
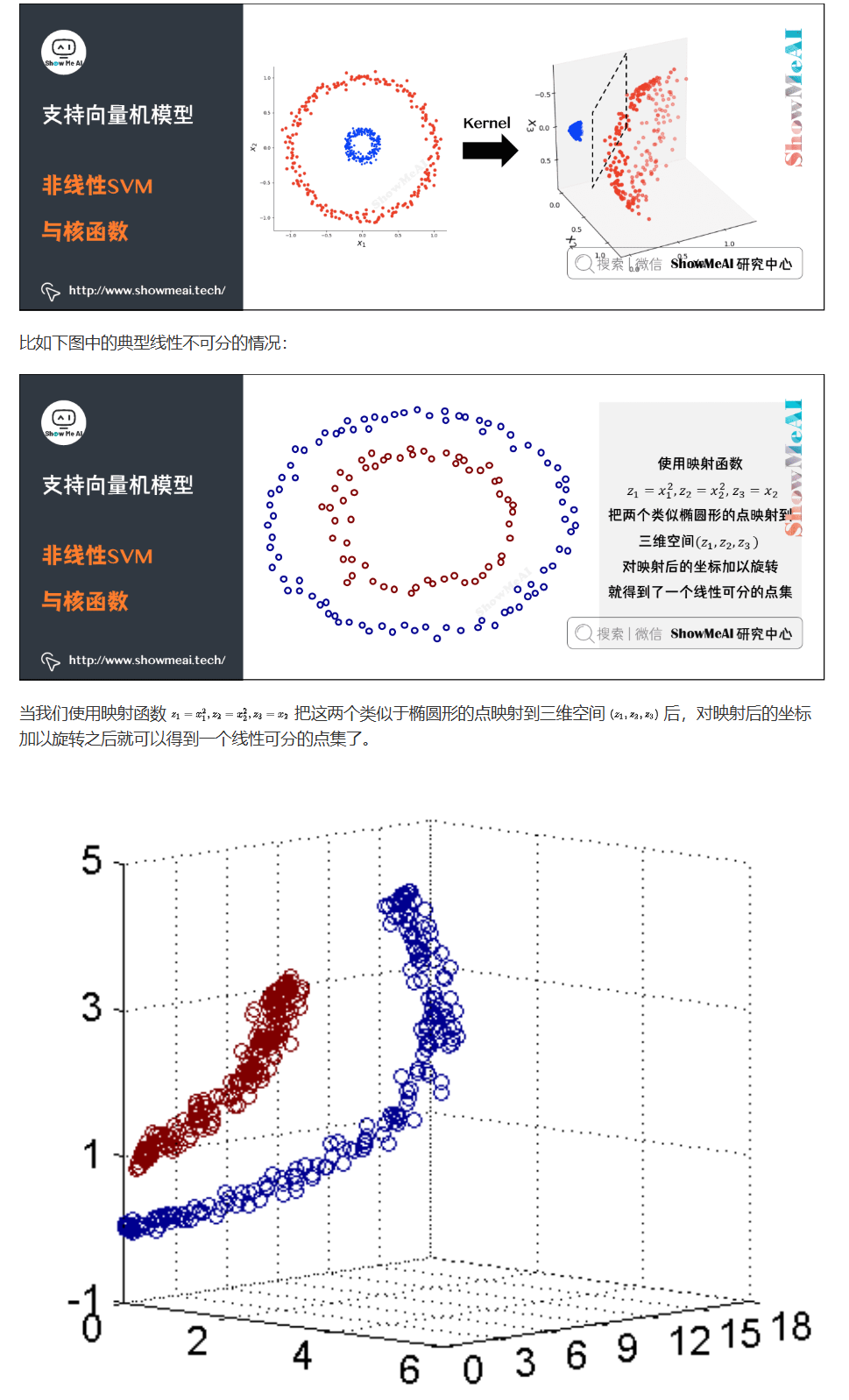
核技巧
- 将样本从原始空间映射到更高维的特征空间
- 在特征空间中寻找线性可分的超平面
- 通过核函数计算特征空间中的内积
- 映射函数:$\phi: \mathcal{X} \to \mathcal{H}$
- 核函数:$K(x,y) = \phi(x) \cdot \phi(y)$
常用核函数
- 线性核:$K(x,y) = x \cdot y$
- 多项式核:$K(x,y) = (x \cdot y + 1)^d$,其中$d$是多项式的阶数
- 高斯核:$K(x,y) = \exp(-\frac{||x-y||^2}{2\sigma^2})$,其中$\sigma$是高斯核的带宽
- Sigmoid核:$K(x,y) = \tanh(\beta x \cdot y + \theta)$,其中$\beta$和$\theta$是参数
- 拉普拉斯核:$K(x,y) = \exp(-\frac{||x-y||}{\sigma})$,其中$\sigma$是参数
- 卡方核:$K(x,y) = \exp(-\gamma \sum_{i=1}^n \frac{(x_i-y_i)^2}{x_i+y_i})$,其中$\gamma$是参数
核函数选择
- 线性核:适用于线性可分的数据
- 多项式核:适用于图像处理等需要高阶特征的问题
- 高斯核:适用于大多数非线性问题,是最常用的核函数
- Sigmoid核:适用于神经网络相关的问题
- 核函数的选择需要考虑:
- 数据的特征和分布
- 计算复杂度
- 模型的泛化能力
特点
优点
- 全局最优解:SVM是一个凸优化问题,求得的解一定是全局最优解
- 非线性分类:通过核技巧可以处理非线性分类问题
- 高维空间:在高维空间中表现良好,即使特征数量大于样本数量
- 泛化能力强:决策边界只由支持向量决定,具有很好的泛化能力
- 鲁棒性好:对噪声数据具有较强的鲁棒性
- 理论基础扎实:基于统计学习理论,有严格的数学推导
- 可解释性强:决策边界由支持向量决定,易于理解和解释
缺点
- 计算复杂度高:训练时间随样本数量增长而快速增长,时间复杂度为$O(n^2)$
- 内存消耗大:需要存储核矩阵,内存消耗为$O(n^2)$
- 参数选择敏感:对核函数的选择和参数设置比较敏感
- 不适用于大规模数据集:当样本数量很大时,训练时间会变得很长
- 对缺失数据敏感:需要完整的数据集进行训练
- 多分类问题复杂:需要额外的策略来处理多分类问题
- 特征工程要求高:对特征的选择和预处理要求较高
模型优化
核函数选择
- 根据数据特征选择合适的核函数
- 通过交叉验证确定最优核函数
- 考虑计算复杂度和模型性能的平衡
- 核函数参数的选择:
- 多项式核的阶数$d$
- 高斯核的带宽$\sigma$
- Sigmoid核的参数$\beta$和$\theta$
参数调优
- 惩罚参数C的选择:
- 使用网格搜索或随机搜索
- 考虑数据的噪声水平
- 平衡模型的复杂度和泛化能力
- 核函数参数的选择:
- 使用交叉验证
- 考虑数据的分布特征
- 避免过拟合和欠拟合
- 惩罚参数C的选择:
数据预处理
- 特征标准化:
- 使用Z-score标准化
- 使用Min-Max归一化
- 特征选择:
- 使用信息增益
- 使用卡方检验
- 使用L1正则化
- 处理缺失值:
- 使用均值填充
- 使用中位数填充
- 使用KNN填充
- 处理类别不平衡:
- 过采样
- 欠采样
- SMOTE算法
- 特征标准化:
代码实现
1 | from sklearn.svm import SVC |
决策树
决策树是基于已知各种情况(特征取值)的基础上,通过构建树型决策结构来进行分析的一种方式,是常用的有监督的分类算法。它能够自动处理非线性关系和特征交互。
特点
- 优点:直观易懂、处理非线性关系和特征交互、对数据分布假设较少、支持多分类问题、对缺失值和异常值具有一定的鲁棒性。
- 缺点:过拟合倾向、不稳定性、全局最优性难以保证、对连续型特征的处理效率较低、特征重要性评估可能存在偏差。
原理
决策树(Decision tree)是基于已知各种情况(特征取值)的基础上,通过构建树型决策结构来进行分析的一种方式,是常用的有监督的分类算法。它能够自动处理非线性关系和特征交互。决策树的总体流程是自根至叶的递归过程,在每个中间结点寻找一个「划分」(split or test)属性。
主流的决策树算法有:
- ID3:基于信息增益来选择分裂属性(每步选择信息增益最大的属性作为分裂节点,树可能是多叉的)。
- C4.5:基于信息增益率来选择分裂属性(每步选择信息增益率最大的属性作为分裂节点,树可能是多叉的)。
- CART:基于基尼系数来构建决策树(每步要求基尼系数最小,树是二叉的)。
其中CART树全称Classification And Regression Tree,既可以用于分类,也可以用于回归,这里指的回归树就是 CART 树,ID3和C4.5不能用于回归问题。
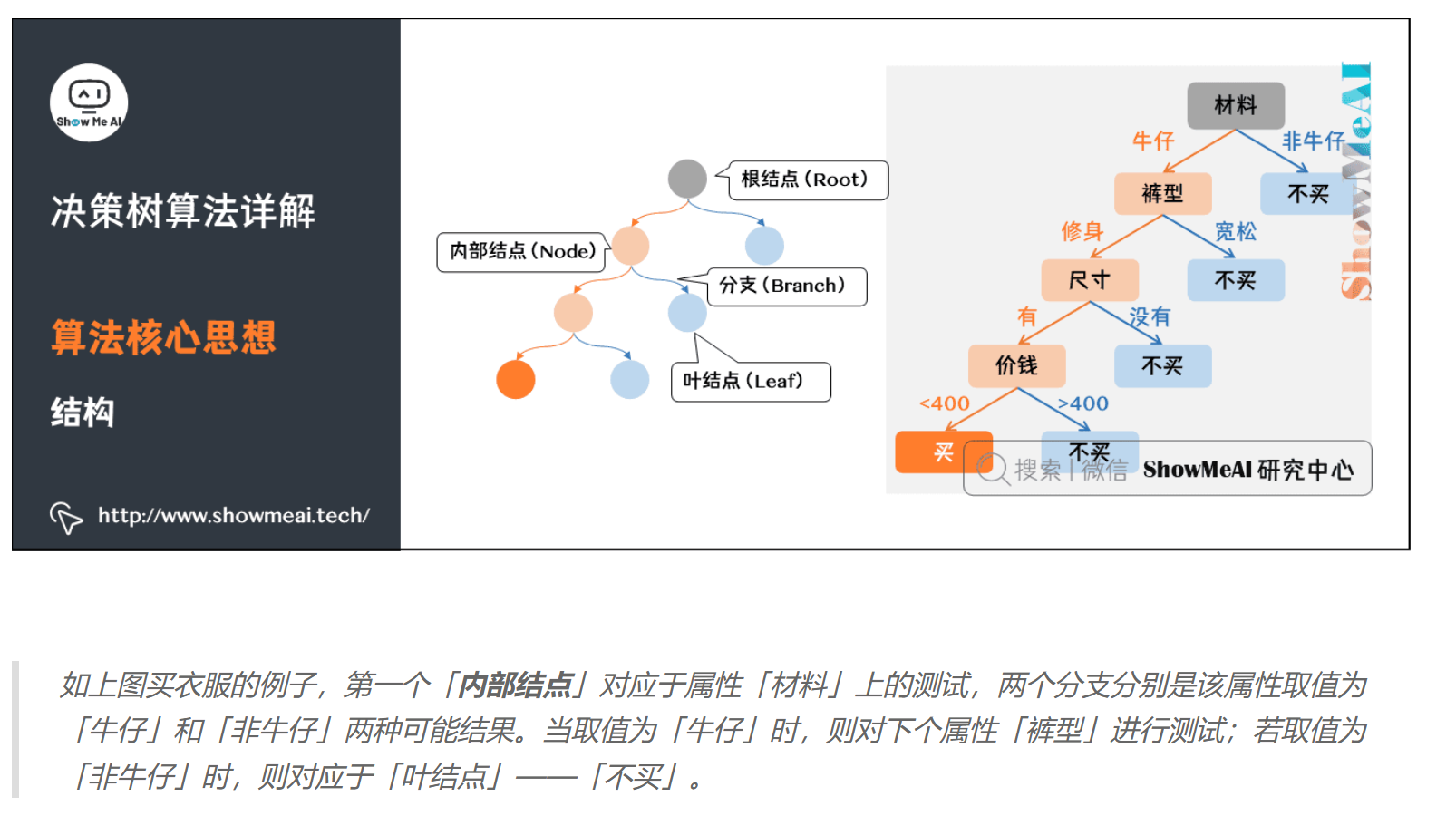
构造
- 每个内部结点表示一个属性的测试
- 每个分支表示一个测试输出
- 每个叶结点代表一种类别
损失函数
决策树的构建过程并不直接使用传统意义上的损失函数,而是通过分裂准则来选择最优的特征和分裂点。分裂准则是评估分裂质量的指标,目的是使分裂后的子节点尽可能纯净(即包含同一类别的样本)。
停止条件
- 当前结点包含的样全属于同一类别。无需划分。
- 样本的属性取值都相同或属性集为空。不能划分。
- 当前结点包含的样本集合为空。不能划分。
伪代码
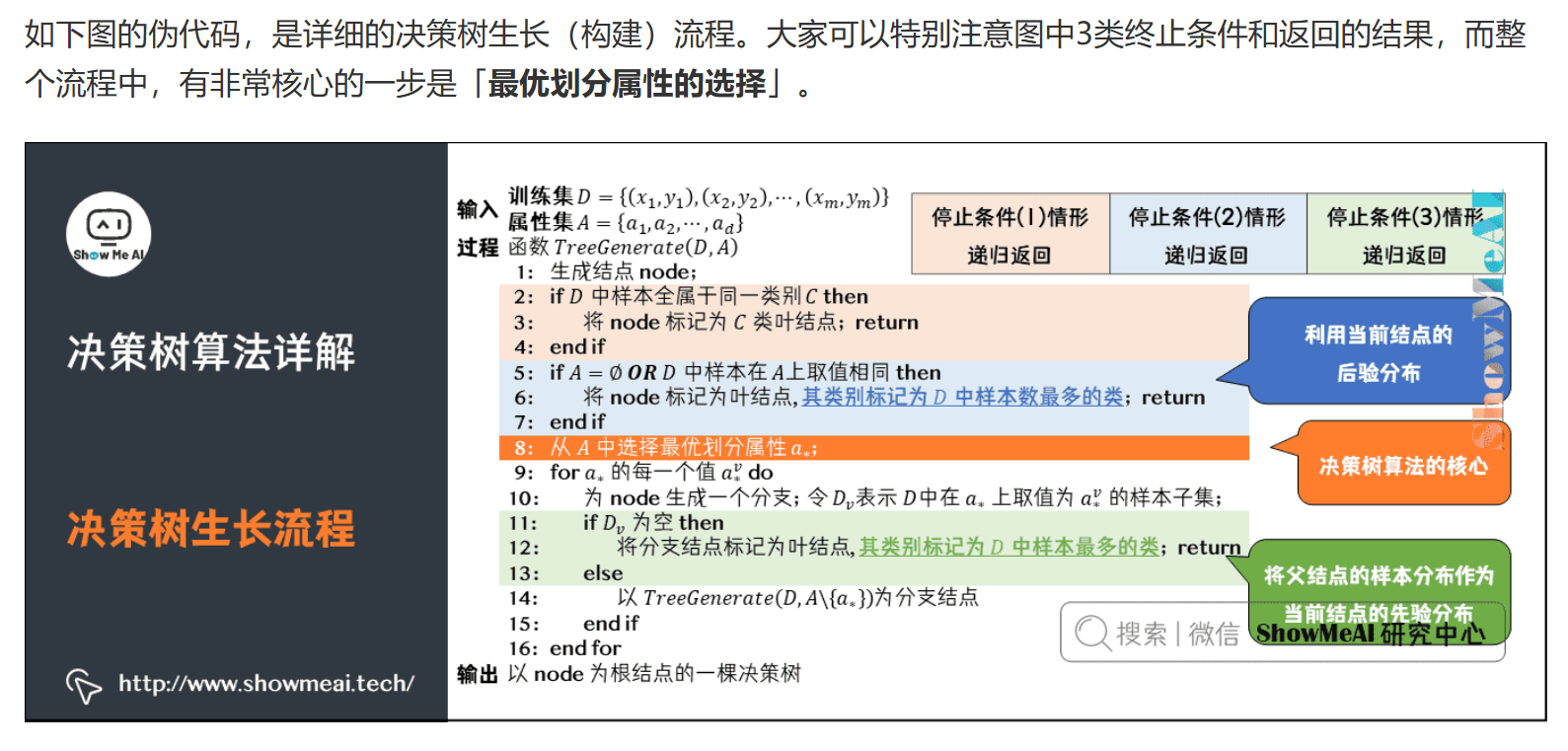
核心概念
决策树如何实现最优划分属性选择:取得最大的信息增益。
信息熵(Entropy)
- 衡量数据的不确定性或混乱程度
- 数学表达:$H(X) = -\sum_{i=1}^n p_i \log_2(p_i)$
- 特点:
- 熵值越大,数据越混乱
- 熵值越小,数据越有序
- 当所有类别概率相等时,熵最大
信息增益(Information Gain)
- 衡量特征对数据集的分类效果
- 在决策树分类问题中,信息增益就是决策树在进行属性选择划分前和划分后的信息差值。
- 计算方式:$IG = H(D) - H(D|A)$
- 其中:
- $H(D)$ 是数据集D的熵
- $H(D|A)$ 是特征A条件下的条件熵
- 特点:
- 信息增益越大,特征越重要
- 用于特征选择
基尼系数(Gini Index)
- 衡量数据的不纯度
- 数学表达:$Gini(D) = 1 - \sum_{i=1}^n p_i^2$
- 特点:
- 值域在[0,1]之间
- 值越小,数据越纯
- 计算比熵更快
模型优化
过拟合问题
- 表现:
- 训练集表现好,测试集表现差
- 树结构过于复杂
- 对噪声数据敏感
- 原因:
- 训练数据不足
- 特征过多
- 树深度过大
如果让决策树一直生长,最后得到的决策树可能很庞大,、且易导致过拟合。缓解决策树过拟合可以通过剪枝操作完成。
- 预剪枝(Pre-pruning):在树生长过程中进行剪枝,设置停止条件,如最大深度、最小样本数、最小信息增益等。
- 优点:计算效率高
- 缺点:可能欠拟合
- 后剪枝(Post-pruning):先生长完整树,再剪枝,方法包括代价复杂度剪枝、错误率降低剪枝等。
- 优点:效果更好
- 缺点:计算成本高
- 特征选择与工程:选择对分类任务最有价值的特征,构造新特征,对连续型特征进行离散化处理等。
- 集成学习:通过组合多个决策树模型来提高分类性能和稳定性,如随机森林、梯度提升树、Adaboost等。
代码实现
1 | from sklearn.tree import DecisionTreeClassifier |
随机森林
随机森林是一种由决策树构成的并行集成算法,属于Bagging类型,通过组合多个弱分类器,最终结果通过投票或取均值,使得整体模型的结果具有较高的精确度和泛化性能,同时也有很好的稳定性,广泛应用在各种业务场景中。
原理
集成学习
集成学习(ensemble learning)是一种将多个个体学习器组合成一个强学习器的方法。
个体学习器
- 同质集成:只包含同种类型的个体学习器,称作基学习器
- 例如:随机森林中全是决策树集成
- 异质集成:包含不同类型的个体学习器,称作组件学习器
- 例如:同时包含决策树和神经网络进行集成
核心问题
个体学习器的选择
- 不能太”弱”,需要有一定的准确性
- 个体学习器之间要具有”多样性”,即存在差异性
结合策略的选择
- 并行组合方式:例如随机森林
- 传统组合方式:例如boosting树模型
Bagging
Bagging是并行式集成学习方法最著名的代表。
Bootstrap Sampling
给定包含m个样本的数据集:
- 随机取出一个样本放入采样集。
- 将该样本放回初始数据集。
- 重复m轮,得到m个样本的采样集。
- 约63.2%的样本出现在采样集中。
- 未出现的约36.8%的样本可用作验证集,来对后续的泛化性能进行「包外估计」。
流程
- 重复采样T次,得到T个含m个训练样本的采样集
- 基于每个采样集训练出一个基学习器
- 对分类任务使用简单投票法
- 对回归任务使用简单平均法
算法流程
- 输入样本集D
- 对于t=1,2,…,T:
- 对训练集进行第t次随机采样,得到采样集Dt
- 用采样集Dt训练第t个决策树模型Gt
- 在节点划分时,随机选择部分特征
- 分类场景:T个基模型投出最多票数的类别为最终类别
特点
核心特点
随机性
样本扰动:基于Bootstrap Sampling
- 约63.2%的样本出现在采样集中
- 带来数据集的差异化
属性扰动:在节点划分时
- 随机选择k个属性
- 从k个属性中选择最优属性进行划分
- 带来基模型的差异性
集成性
- 多个差异化采样集
- 训练多个差异化决策树
- 采用投票或平均法提高稳定性
优点
- 适用于高维稠密型数据
- 可判断特征重要程度
- 可构建组合特征
- 并行集成,控制过拟合
- 工程实现并行简单
- 对不平衡数据集友好
- 对特征缺失鲁棒性强
缺点
- 噪声过大时可能过拟合
- 模型解释较复杂
参数调优
核心参数
max_features:生成单颗决策树时的特征数
- 增加:提高单树性能,降低树间差异
- 减小:影响单树性能,影响整体效果
- 需要平衡选择
n_estimators:决策树的棵树
- 较多:提高稳定性和泛化能力
- 较少:加快学习速度
- 根据计算资源选择
max_depth:树深
- 过大:可能导致过拟合
- 过小:可能欠拟合
- 根据样本量和特征数调整
参数选择
- max_features:总数的百分比,常见选择区间[0.1, 0.9]
- n_estimators:通常设置为[100, 1000],根据计算资源调整
- max_depth:常见选择在[3, 10]之间
- min_samples_split:内部节点再划分所需最小样本数
- 样本量不大:默认值
- 样本量很大:可设置为[5, 10, 20]等
- min_samples_leaf:叶子节点最少样本数,通常≥1
代码实现
1 | from sklearn.ensemble import RandomForestClassifier |
GBDT
GBDT(Gradient Boosting Decision Tree),全名叫梯度提升决策树,是一种迭代的决策树算法,又叫MART(Multiple Additive Regression Tree),它通过构造一组弱的学习器(树),并把多颗决策树的结果累加起来作为最终的预测输出。
原理
Boosting
Boosting方法训练基分类器时采用串行的方式,各个基分类器之间有依赖。它的基本思路是:
- 将基分类器层层叠加
- 每一层在训练时,对前一层基分类器分错的样本给予更高的权重
- 测试时,根据各层分类器的结果的加权得到最终结果
与Bagging不同,Boosting在训练过程中,各基分类器之间有强依赖,必须串行训练。
GBDT详解
GBDT的核心原理:
- 所有弱分类器的结果相加等于预测值
- 每次都以当前预测为基准,下一个弱分类器去拟合误差函数对预测值的残差
- GBDT的弱分类器使用的是树模型
GBDT与负梯度近似残差
回归任务下,GBDT在每一轮的迭代时对每个样本都会有一个预测值,此时的损失函数为均方差损失函数:
$L(y, F(x)) = \frac{1}{2}(y - F(x))^2$
损失函数的负梯度计算如下:
$-\frac{\partial L(y, F(x))}{\partial F(x)} = y - F(x)$
可以看出,当损失函数选用均方误差损失时,每一次拟合的值就是(真实值-预测值),即残差。
GBDT训练过程
- 初始化模型,预测值为训练集标签的均值
- 计算残差(实际值-预测值)
- 训练新的决策树来拟合残差
- 将新树的预测结果累加到原有预测结果上
- 重复步骤2-4,直到达到指定的迭代次数或残差足够小
具体例子
假设我们要预测学生的考试成绩,特征包括:学习时间、作业完成率、课堂参与度等。
第一轮迭代:
初始化:
- 所有学生的预测值设为训练集平均分,假设为75分
- 计算每个学生的残差(实际分数 - 75分)
训练第一棵树:
- 输入:学习时间、作业完成率、课堂参与度
- 目标:预测残差
- 例如:
- 学生A:实际分数85分,残差为10分
- 学生B:实际分数65分,残差为-10分
- 学生C:实际分数80分,残差为5分
更新预测值:
- 学生A:75 + 10 = 85分
- 学生B:75 + (-10) = 65分
- 学生C:75 + 5 = 80分
第二轮迭代:
计算新的残差:
- 学生A:85 - 85 = 0分
- 学生B:65 - 65 = 0分
- 学生C:80 - 80 = 0分
训练第二棵树:
- 输入:相同的特征
- 目标:预测新的残差
- 由于残差已经很小,这棵树会很小或停止生长
最终预测:
- 将所有树的预测结果相加
- 例如:学生A的最终预测 = 75 + 10 + 0 = 85分
梯度提升 vs 梯度下降
两种迭代优化算法的对比:
梯度下降
- 模型以参数化形式表示
- 模型的更新等价于参数的更新
- 公式:$\theta_t = \theta_{t-1} - \eta \nabla L(\theta_{t-1})$
梯度提升
- 模型直接定义在函数空间中
- 大大扩展了可使用的模型种类
- 公式:$F_t(x) = F_{t-1}(x) - \eta \nabla L(F_{t-1}(x))$
具体例子对比
假设我们要优化一个简单的线性模型:$y = wx + b$
梯度下降:
- 初始化参数:$w = 0, b = 0$
- 计算梯度:$\frac{\partial L}{\partial w}, \frac{\partial L}{\partial b}$
- 更新参数:
- $w_{new} = w_{old} - \eta \frac{\partial L}{\partial w}$
- $b_{new} = b_{old} - \eta \frac{\partial L}{\partial b}$
梯度提升:
- 初始化模型:$F_0(x) = 0$
- 计算负梯度:$-\frac{\partial L}{\partial F_0(x)}$
- 训练新树$h_1(x)$拟合负梯度
- 更新模型:$F_1(x) = F_0(x) + \eta h_1(x)$
特点
优点
- 预测阶段可并行化计算,计算速度快
- 适用稠密数据,泛化能力和表达能力都不错
- 可解释性不错,鲁棒性亦可
- 能够自动发现特征间的高阶关系
缺点
- 在高维稀疏数据集上效率较差
- 适合数值型特征,在NLP或文本特征上表现弱
- 训练过程无法并行
- 对异常值比较敏感
随机森林 vs GBDT
相同点
- 都是集成模型,由多棵树组成
- 最终结果都由多棵树一起决定
- 使用CART树时,可以是分类树或回归树
不同点
- 训练过程:随机森林可并行生成,GBDT只能串行生成
- 结果计算:随机森林是多数表决,GBDT是多棵树累加
- 异常值处理:随机森林对异常值不敏感,GBDT对异常值敏感
- 模型优化:随机森林降低方差,GBDT降低偏差
代码实现
1 | import numpy as np |
XGBoost
XGBoost(eXtreme Gradient Boosting)是一个强大的Boosting算法工具包,在数据科学竞赛中表现优异,现在很多大厂的机器学习方案都会首选这个模型。XGBoost在并行计算效率、缺失值处理、控制过拟合、预测泛化能力上都表现非常优秀。
原理
基本概念
Boosting集成学习
- 串行训练多个弱学习器
- 每个弱学习器关注之前模型预测错误的样本
- 最终结果由所有弱学习器加权组合
XGBoost的核心思想
- 使用CART回归树作为基学习器
- 通过梯度提升的方式训练模型
- 使用二阶导数信息优化目标函数
- 加入正则化项控制模型复杂度
目标函数设计
- 总体目标函数:$Obj(\Theta) = L(\Theta) + \Omega(\Theta)$
- $L(\Theta)$:训练损失函数,衡量模型预测值与真实值的差距
- $\Omega(\Theta)$:正则化项,控制模型复杂度
- 第t次迭代的目标函数:
$Obj^{(t)} = \sum_{i=1}^n l(y_i, \hat{y}_i^{(t-1)} + f_t(x_i)) + \Omega(f_t)$- $\hat{y}_i^{(t-1)}$:前t-1棵树的预测结果
- $f_t(x_i)$:第t棵树的预测结果
- 意义:每次迭代都优化当前树的预测结果,同时考虑模型复杂度
- 总体目标函数:$Obj(\Theta) = L(\Theta) + \Omega(\Theta)$
泰勒展开近似
- 展开过程:
$l(y_i, \hat{y}_i^{(t-1)} + f_t(x_i)) \approx l(y_i, \hat{y}_i^{(t-1)}) + g_i f_t(x_i) + \frac{1}{2}h_i f_t^2(x_i)$- $g_i = \frac{\partial l(y_i, \hat{y}_i^{(t-1)})}{\partial \hat{y}_i^{(t-1)}}$:一阶导数
- $h_i = \frac{\partial^2 l(y_i, \hat{y}_i^{(t-1)})}{\partial (\hat{y}_i^{(t-1)})^2}$:二阶导数
- 意义:
- 将复杂的损失函数近似为二次函数
- 便于计算最优解
- 提高计算效率
- 展开过程:
正则化项设计
- 树的复杂度定义:
$\Omega(f_t) = \gamma T + \frac{1}{2}\lambda \sum_{j=1}^T w_j^2$- $T$:叶子节点个数,控制树的深度
- $w_j$:第j个叶子节点的权重,控制节点预测值
- $\gamma, \lambda$:控制正则化强度的超参数
- 意义:
- 控制树的生长,防止过拟合
- 平衡模型的复杂度和预测能力
- 提高模型的泛化能力
- 树的复杂度定义:
树的生成过程
节点分裂
贪心算法:遍历所有特征和所有可能的分裂点
分裂收益计算:
$Gain = \frac{1}{2}[\frac{G_L^2}{H_L + \lambda} + \frac{G_R^2}{H_R + \lambda} - \frac{(G_L + G_R)^2}{H_L + H_R + \lambda}] - \gamma$- $G_L, G_R$:左右子节点的一阶导数之和
- $H_L, H_R$:左右子节点的二阶导数之和
意义:
- 衡量分裂前后的损失减少程度
- 考虑正则化项的影响
- 指导最优分裂点的选择
具体例子:
假设我们要预测房价,特征包括:面积、位置、房龄等- 第一步:选择”面积”作为第一个分裂特征,将样本分为”大户型”和”小户型”
- 第二步:在”大户型”中,可能用”位置”继续分裂
- 第三步:在”小户型”中,可能用”房龄”继续分裂
- 最终:每个叶子节点都会给出一个预测值(房价)
分裂点选择过程:
- 遍历所有可能的面积值(如:50㎡, 60㎡, 70㎡…)
- 对每个值,计算分裂后的左右子节点的梯度统计量
- 选择使Gain最大的面积值作为分裂点
叶子节点权重计算
最优权重:
$w_j^* = -\frac{G_j}{H_j + \lambda}$- $G_j$:该叶子节点所有样本的一阶导数之和
- $H_j$:该叶子节点所有样本的二阶导数之和
意义:
- 使目标函数最小化
- 考虑样本的梯度信息
- 平衡预测准确性和模型复杂度
具体例子:
假设一个叶子节点包含3个样本:- 样本1:$g_1=0.5, h_1=1.0$
- 样本2:$g_2=0.3, h_2=0.8$
- 样本3:$g_3=0.4, h_3=0.9$
- $G_j = 0.5 + 0.3 + 0.4 = 1.2$
- $H_j = 1.0 + 0.8 + 0.9 = 2.7$
- 假设$\lambda = 1$,则$w_j^* = -\frac{1.2}{2.7 + 1} = -0.32$
停止条件
达到最大深度
分裂收益小于阈值
叶子节点样本数小于阈值
意义:
- 控制树的生长
- 防止过拟合
- 提高计算效率
具体例子:
- 最大深度:设置max_depth=3,则树最多有3层
- 最小分裂收益:设置min_gain=0.1,则Gain<0.1时停止分裂
- 最小样本数:设置min_samples=10,则样本数<10时停止分裂
实际训练过程
第一步:初始化
- 所有样本的预测值设为0
- 计算初始梯度$g_i$和$h_i$
第二步:迭代训练
- 对每棵树:
- 计算所有样本的梯度
- 选择最佳分裂特征和分裂点
- 生成新的子节点
- 计算叶子节点权重
- 更新所有样本的预测值
- 对每棵树:
第三步:预测
- 将样本从根节点开始,按照分裂规则向下遍历
- 到达叶子节点后,使用该节点的权重作为预测值
- 将所有树的预测值相加得到最终预测
优化策略
近似算法
- 分位数划分:
- 将特征值按分位数划分
- 减少候选分裂点数量
- 提高计算效率
- 全局/局部策略:
- 全局:在根节点分裂前计算一次
- 局部:每个节点分裂前都计算
- 平衡计算效率和精度
- 分位数划分:
特征缺失处理
- 稀疏感知:
- 将缺失值和稀疏值等同处理
- 跳过缺失值的整体
- 提高计算效率
- 分裂方向:
- 考虑缺失值的两个方向
- 选择最优的分裂方向
- 提高模型鲁棒性
- 稀疏感知:
并行计算
- 特征预排序&块式存储
- XGBoost 将每一列特征提前进行排序,以块(Block)的形式储存在缓存中,并以索引将特征值和梯度统计量对应起来,每次节点分裂时会重复调用排好序的块。而且不同特征会分布在独立的块中,因此可以进行分布式或多线程的计算。
- 缓存访问优化
- 特征值排序后通过索引来取梯度$g_i$、$h_i$会导致访问的内存空间不一致,进而降低缓存的命中率,影响算法效率。为解决这个问题,XGBoost为每个线程分配一个单独的连续缓存区,用来存放梯度信息。
- 核外块计算
- 数据量非常大的情形下,无法同时全部载入内存。XGBoost 将数据分为多个 blocks 储存在硬盘中,使用一个独立的线程专门从磁盘中读取数据到内存中,实现计算和读取数据的同时进行。
- 为了进一步提高磁盘读取数据性能,XGBoost 还使用了两种方法:
- ① 压缩 block,用解压缩的开销换取磁盘读取的开销。
- ② 将 block 分散储存在多个磁盘中,提高磁盘吞吐量。
特点
1. 优势
精度高
- 使用二阶导数信息
- 支持自定义损失函数
- 正则化控制过拟合
效率高
- 特征预排序
- 并行计算
- 缓存优化
实用性强
- 支持缺失值处理
- 支持早停
- 支持特征重要性评估
2. 局限性
计算资源需求
- 需要较大的内存
- 训练时间可能较长
- 参数调优复杂
数据要求
- 对异常值敏感
- 需要足够的训练数据
- 特征工程要求高
代码实现
1 | import xgboost as xgb |
LightGBM
LightGBM是微软开发的boosting集成模型,是对GBDT的优化和高效实现。相比XGBoost,它在训练效率、内存使用、准确率等方面都有显著提升。
原理
开发动机
大数据量下的GBDT问题
- 传统GBDT每次迭代需要遍历整个训练数据多次
- 数据量大时面临内存限制
- 反复读写训练数据消耗大量时间
- 工业级海量数据下效率不足
XGBoost的局限性
精确贪心算法:
- 优点:可以找到精确的划分条件
- 缺点:计算量巨大、内存占用巨大、易产生过拟合
Level-wise生长方式:
- 优点:可以使用多线程、加速精确贪心算法
- 缺点:效率低下,可能产生不必要的叶结点
- 原理:按层生长,每次同时分裂同一层的所有叶子节点
- 具体过程:
- 从根节点开始,第一层只有一个节点
- 第二层同时分裂所有节点,产生多个子节点
- 第三层再次同时分裂所有节点
- 以此类推,直到达到最大深度
- 假设最大深度为3——第一层:根节点;第二层:同时分裂根节点,得到2个子节点;第三层:同时分裂第二层的2个节点,得到4个叶子节点
- 问题:
- 同一层的节点可能增益差异很大
- 低增益的节点也被强制分裂
- 增加了不必要的计算开销
Cache优化不友好:
- 特征对梯度的访问是随机访问
- 不同特征访问顺序不一致
- 造成较大的cache miss
核心优化点
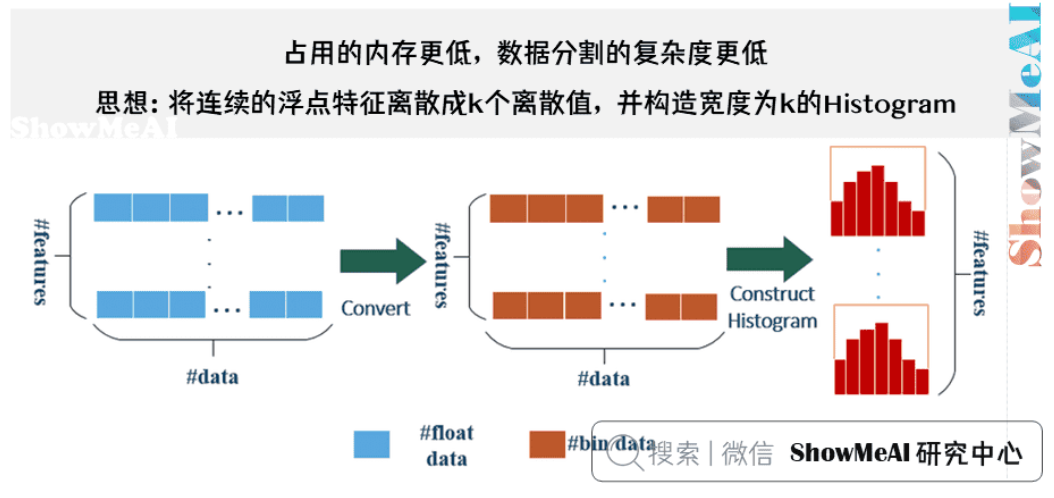
基于Histogram的决策树算法
原理:
- 将连续的浮点特征离散成k个离散值,并构造宽度为k的Histogram。
- 遍历训练数据,统计每个离散值在直方图中的累计统计量(统计每个区间的样本数量、梯度等信息;每个区间用一个值表示(如:区间中点))。
- 在进行特征选择时,只需要根据直方图的离散值,遍历寻找最优的分割点。
Histogram(直方图)详解:
- 定义:一种数据分布的图形表示,将数据范围分成若干个区间,统计每个区间的数据频数
- 在LightGBM中的应用:
- 将连续特征值域范围分成k个等宽区间
- 每个区间称为一个bin(桶)
- 对每个bin统计:
- 样本数量
- 一阶梯度之和
- 二阶梯度之和
优势:
- 内存优化:从O(#data)降低到O(#bins)
- 计算量优化:时间复杂度从O(#data)降低到O(#bins)
- 正则化效果:分桶操作本身具有正则化作用,可以防止过拟合
具体例子:
假设有一个”用户年龄”特征,取值范围是18-60岁:- 传统方法:需要存储每个用户的精确年龄,排序后遍历所有可能的分裂点
- LightGBM方法:将年龄分成8个区间,每个区间用中点表示,只需要存储8个值
带深度限制的Leaf-wise叶子生长策略
原理:
- 每次选择增益最大的叶子节点进行分裂
- 与Level-wise(按层生长)不同
- 可以更快地降低损失函数
优势:
- 更快的收敛速度
- 更好的模型精度
- 更少的树节点
具体例子:
假设我们在预测房价,特征包括:面积、位置、房龄等- Level-wise生长:同时分裂同一层的所有叶子节点
- Leaf-wise生长:每次只选择增益最大的叶子节点进行分裂
直方图做差加速
原理:
- 利用直方图的特性,通过做差的方式计算分裂增益
- 减少重复计算
- 提高计算效率
直方图特性:
- 可加性:
- 两个相邻区间的统计信息可以合并
- 例如:bin1和bin2的样本数之和等于bin1+2的样本数
- 梯度信息也具有可加性
- 可减性:
- 从父节点的统计信息中减去子节点的统计信息
- 例如:父节点样本数 - 左子节点样本数 = 右子节点样本数
- 避免重复计算子节点的统计信息
- 局部性:
- 相邻区间的统计信息变化较小
- 可以利用缓存提高访问效率
- 减少内存访问开销
- 稀疏性:
- 很多区间的统计信息可能为0
- 可以跳过这些区间的计算
- 进一步提高计算效率
- 可加性:
优势:
- 减少计算量
- 提高训练速度
- 降低内存使用
直接支持类别特征
原理:
- 无需one-hot编码
- 直接使用类别特征
- 在分裂时,尝试不同的类别组合
优势:
- 更高效的特征处理,可以找到最优的类别组合
- 不需要one-hot编码,降低内存使用
- 提高计算效率:时间复杂度为O(k),k为类别数量
具体例子:
假设有一个”用户等级”特征,取值为:普通、银卡、金卡、钻石- 传统方法:需要one-hot编码,特征维度从1维变成4维
- LightGBM方法:直接使用类别特征,在分裂时尝试不同的类别组合
- 分裂过程示例:
- 第一次尝试:{普通, 银卡} vs {金卡, 钻石}
- 第二次尝试:{普通, 金卡} vs {银卡, 钻石}
- 第三次尝试:{普通, 钻石} vs {银卡, 金卡}
- 第四次尝试:{普通} vs {银卡, 金卡, 钻石}
- 以此类推,尝试所有可能的组合
- 计算每种组合的增益:
- 统计每个组合中的样本数量
- 计算每个组合的梯度信息
- 选择增益最大的组合作为分裂点
- 分裂过程示例:
Cache命中率优化
原理:
- 优化内存访问模式
- 提高cache命中率
- 减少cache miss
优势:
- 提高内存访问效率
- 减少计算时间
- 提高训练速度
基于直方图的稀疏特征优化
原理:
- 高效处理稀疏数据
- 降低内存使用
- 提高计算效率
优势:
- 更好的处理稀疏特征
- 降低内存使用
- 提高训练速度
多线程优化
原理:
- 支持并行计算
- 提高训练效率
- 充分利用多核CPU
优势:
- 更快的训练速度
- 更好的资源利用
- 支持大规模数据
算法对比
- XGBoost:Pre-sorted算法
流程:
- 对所有特征按数值进行预排序
- 每次分割时用O(#data)的代价找到最优分割点
- 找到最终特征和分割点,分裂数据
缺点:
- 内存需要训练数据的两倍
- 遍历分割点时需要计算分裂增益
- 计算代价大
- 精确贪心算法
- 原理:精确贪心算法是指每一轮分裂时,遍历所有特征的所有可能分割点,计算每个分割点的分裂增益,选择增益最大的分割点进行分裂。每次分割都能找到最优的分割点,因此理论上分裂点最优。但每轮都需要遍历整个训练数据多次,计算量和内存消耗都非常大。如果把全部训练数据装进内存,会限制数据规模;如果不装进内存,反复读写训练数据又会消耗大量时间。
- 分裂增益公式:
$$ Gain = \frac{1}{2} \left[ \frac{G_L^2}{H_L + \lambda} + \frac{G_R^2}{H_R + \lambda} - \frac{(G_L + G_R)^2}{H_L + H_R + \lambda} \right] - \gamma $$
其中:- $G_L, H_L$:分割后左子树的一阶、二阶梯度和
- $G_R, H_R$:分割后右子树的一阶、二阶梯度和
- $\lambda$:正则化参数
- $\gamma$:叶子节点复杂度惩罚项
- $(G_L + G_R), (H_L + H_R)$:分割前节点的梯度和
- 公式解释:
- 第一项:分割后左子树的得分
- 第二项:分割后右子树的得分
- 第三项:分割前节点的得分
- 第四项:增加一个节点的复杂度惩罚
- 优点:
- 可以找到最精确的划分条件,理论上分裂点最优。
- 缺点:
- 计算量巨大,内存占用大,尤其在大数据场景下效率低下。
- 容易产生过拟合,因为每次都能找到最优分割,模型复杂度高。
- 每一轮分裂时,遍历所有特征的所有可能分割点,计算上述公式,选择增益最大的分割点进行分裂。
- 这种方式虽然精确,但在大数据下会极大拖慢训练速度,且对内存要求高。
- 分裂增益公式:
- 原理:精确贪心算法是指每一轮分裂时,遍历所有特征的所有可能分割点,计算每个分割点的分裂增益,选择增益最大的分割点进行分裂。每次分割都能找到最优的分割点,因此理论上分裂点最优。但每轮都需要遍历整个训练数据多次,计算量和内存消耗都非常大。如果把全部训练数据装进内存,会限制数据规模;如果不装进内存,反复读写训练数据又会消耗大量时间。
- LightGBM:直方图算法
思想:
- 将连续特征离散成k个离散值
- 构造宽度为k的直方图
- 根据直方图寻找最优分割点
优势:
- 内存优化:不需要存储预排序结果
- 计算量优化:时间复杂度从O(#data)降到O(k)
- 正则化效果:分桶bin替代原始数据
注意点:
- 分桶bin数量决定正则化程度
- bin越少惩罚越严重,欠拟合风险越高
- 预先设定bin范围,无需排序
- 直方图保存划分阈值、样本数、梯度信息
策树生长策略
XGBoost:Level-wise
- 同时分裂同一层的叶子
- 支持多线程优化
- 不容易过拟合
- 可能产生不必要的分裂
LightGBM:Leaf-wise
- 每次找到分裂增益最大的叶子
- 降低更多误差
- 得到更好精度
- 可能产生过深的树
- 通过最大深度限制防止过拟合
5. 类别特征支持
传统方法的问题
- one-hot编码效率低
- 可能无法在类别特征上切分
- 数据切分过于零碎
- 统计信息不准确
LightGBM的解决方案
- 采用Many vs Many的切分方式
- 直接输入类别特征
- 实现类别特征的最优切分
- 时间复杂度从O(2^k)优化到O(k)
具体流程
建立直方图:
- 统计离散值出现次数
- 过滤低频特征值
- 建立bin容器
计算分裂阈值:
- 根据bin容器数量选择策略
- 使用one vs other或many vs many
- 计算最优分裂点
特征分裂:
- 根据阈值集合划分数据
- 决定样本归属
6. 并行优化
特征并行
- 不同机器处理不同特征
- 本地保存全部数据
- 避免数据切分通信
数据并行
- 本地构造直方图
- 全局合并
- 寻找最优分割点
- 使用分散规约降低通信量
网络通信优化
- 使用histogram算法降低通信代价
- 实现并行计算的线性加速
- 支持大规模分布式训练
代码实现
1 | import lightgbm as lgb |