


参考:
神经网络基础
大部分数据是线性不可分的所以需要非线性分类器,神经网络是一类具有非线性决策分界的分类器。
神经网络是受生物学启发的分类器,常被称为”人工神经网络”,以区别于有机类。
单个神经元
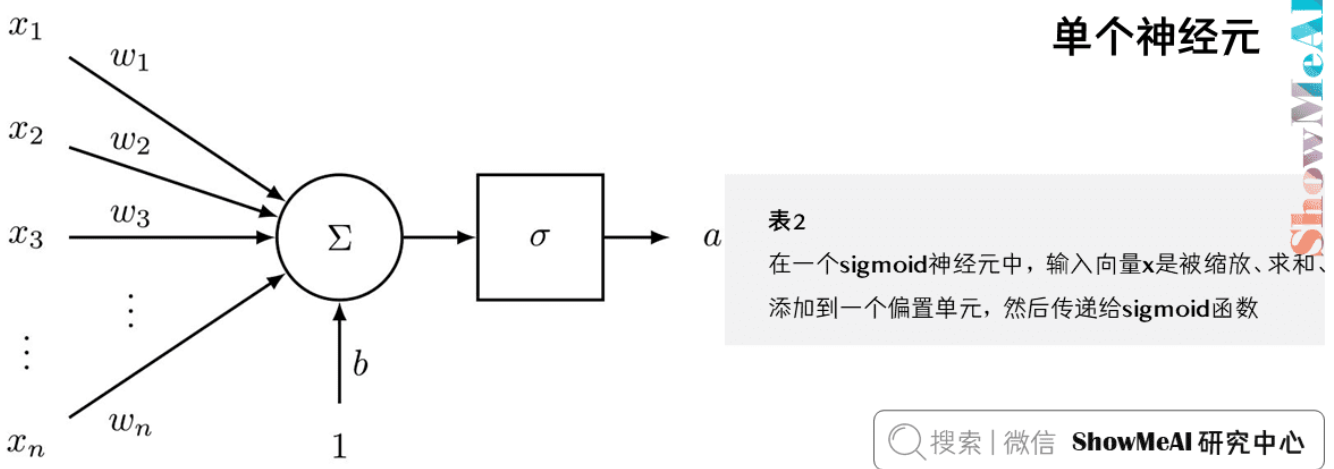
神经网络的基本组成单元是神经元,它模拟了人脑神经元的工作方式。每个神经元接收多个输入信号,经过处理后产生一个输出信号。
- 神经元是一个通用的计算单元,接受n个输入并产生一个输出
- 常见的神经元选择是二元逻辑回归单元,它能够将输入映射到[0,1]区间
- 神经元与n维权重向量w和偏置标量b相关联,这些参数决定了神经元的行为
- 输出计算公式:$a = \frac{1}{1 + e^{-(w^Tx + b)}}$,这个公式称为sigmoid函数,记作 $\sigma$
- 为了简化计算,可以将权重和偏置合并:$a = \frac{1}{1 + e^{-[w^T, b] \cdot [x, 1]}}$
单层神经网络
单层神经网络是多个神经元的组合,它们并行工作,共同处理输入数据。这种结构能够学习更复杂的特征表示。
- 将单个神经元扩展到多个神经元,形成一层网络
- 定义不同神经元的权重、偏置和激活输出:
- 权重矩阵:$W \in \mathbb{R}^{n \times m}$,表示输入到输出的映射关系
- 偏置向量:$b \in \mathbb{R}^m$,用于调整每个神经元的激活阈值
- 激活输出:$a = \sigma(Wx + b)$,其中σ是激活函数
- 使用矩阵形式简化表达:
- $z = Wx + b$,这是线性变换部分
- $a = \sigma(z)$,这是非线性激活部分
- 激活函数用于捕捉非线性特征组合,使网络能够学习复杂的模式
- 维度分析:如果使用d维词向量,窗口大小为n,则输入维度为$n \times d$
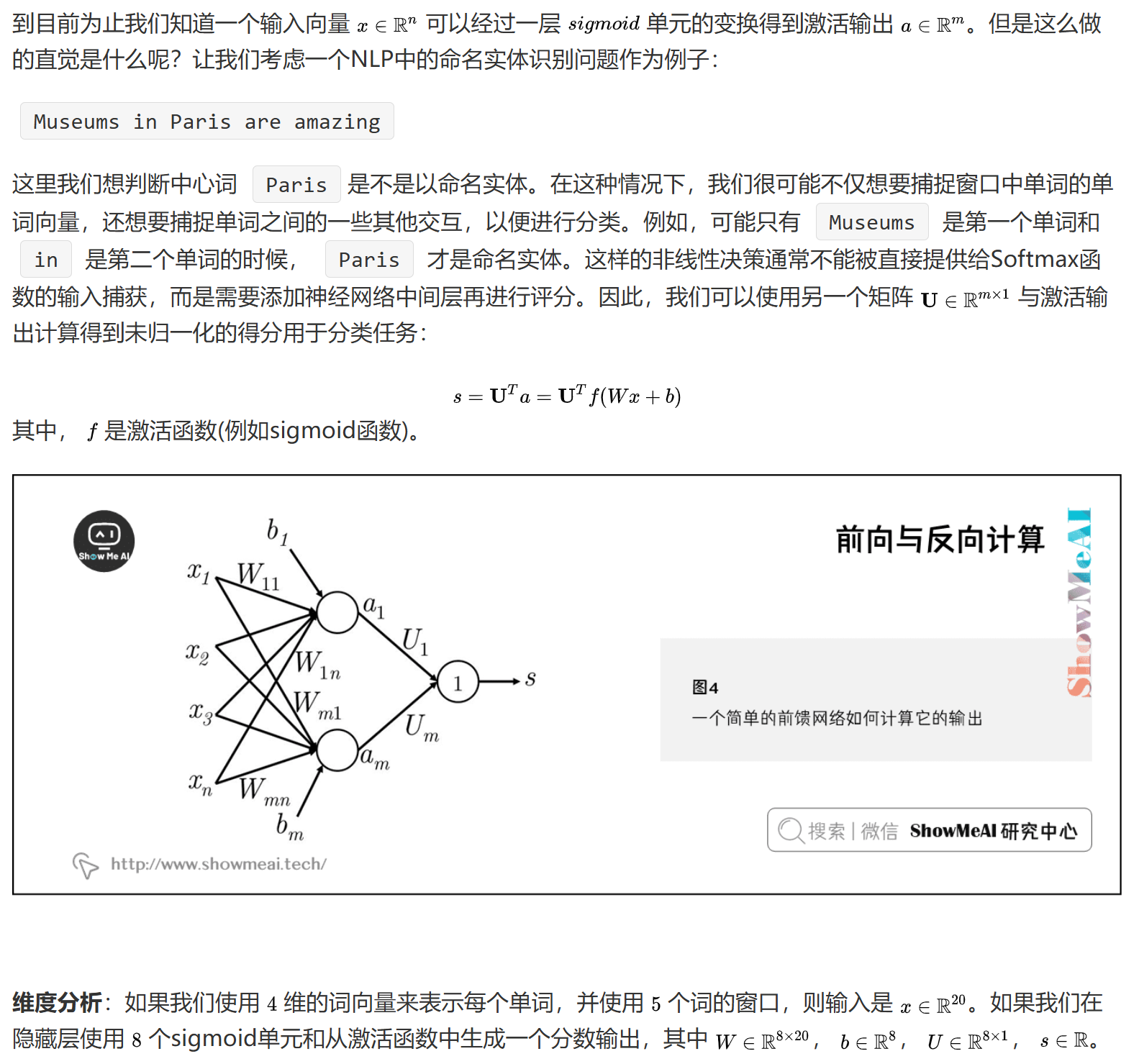
前向与反向计算
神经网络的计算分为前向传播和反向传播两个阶段。前向传播用于计算输出,反向传播用于更新参数。
- 前向计算:输入向量经过一层单元变换得到激活输出
- 输入层:$x \in \mathbb{R}^{n \times d}$,原始输入数据
- 隐藏层:$h = \sigma(W_1x + b_1)$,第一层变换
- 输出层:$s = W_2h + b_2$,最终输出
- 反向计算:通过链式法则计算梯度,用于参数更新
- 输出层梯度:$\frac{\partial L}{\partial W_2} = \frac{\partial L}{\partial s} \cdot h^T$,表示输出层参数对损失的影响
- 隐藏层梯度:$\frac{\partial L}{\partial W_1} = \frac{\partial L}{\partial h} \cdot x^T$,表示隐藏层参数对损失的影响
- 维度分析:考虑词向量维度、窗口大小等,确保矩阵运算维度匹配
合页损失
合页损失(Hinge Loss)是一种常用的损失函数,特别适用于分类问题。
它通过最大化正负样本之间的间隔来提高模型的泛化能力。
- 常用的误差度量方法:maximum margin objective 最大间隔目标函数——确保分类边界有足够的间隔
- 保证”真”标签得分高于”假”标签,提高分类准确性
- 引入安全间隔Δ,增加模型的鲁棒性
- 优化目标函数:$J = \max(0, s_c - s + \Delta)$,其中$s_c$是正确类别的得分
- 完整损失函数:$J = \frac{1}{N}\sum_{i=1}^N \max(0, s_c^{(i)} - s^{(i)} + \Delta)$,考虑所有样本
- 梯度计算:
- 当$s_c - s + \Delta > 0$时:$\frac{\partial J}{\partial s} = -1$,需要降低错误类别的得分
- 当$s_c - s + \Delta \leq 0$时:$\frac{\partial J}{\partial s} = 0$,已经达到目标间隔
反向传播
反向传播是神经网络训练的核心算法,它通过链式法则计算每个参数对损失的贡献,从而指导参数更新。
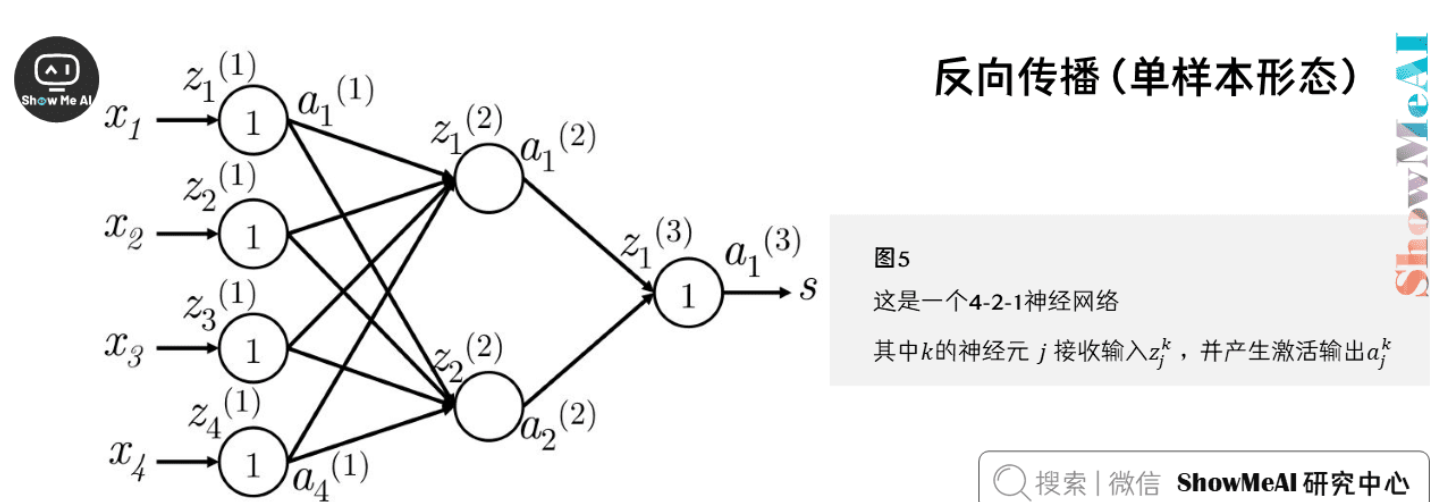
单样本形态
- 利用微分链式法则计算梯度,实现端到端的梯度传播
- 误差共享/分配机制,确保每个参数得到合适的更新
- 偏置更新规则:偏置的梯度等于输出梯度
详细推导
以单个隐藏层和单个输出单元的神经网络为例。建立一些符号定义:
- $x_i$:神经网络的输入
- $s$:神经网络的输出
- 每层(包括输入和输出层)的神经元都接收一个输入并生成一个输出。第$k$层的第$j$个神经元接收标量输入$z_j^{(k)}$,并生成一个标准激活输出$a_j^{(k)}$
- 反向传播误差定义为$\delta_j^{(k)}$
- 第1层是输入层,而不是第1个隐藏层。对输入层而言,$x_j = z_j^{(1)} = a_j^{(1)}$
- $W^{(k)}$是将第$k$层的输出映射到第$k+1$层输入的转移矩阵。例如$W^{(1)}=W, W^{(2)}=U$
假设损失函数$J=(1+s_c-s)$为正值,想更新参数$W_{14}^{(1)}$,它只参与$z_1^{(2)}$和$a_1^{(2)}$的计算。
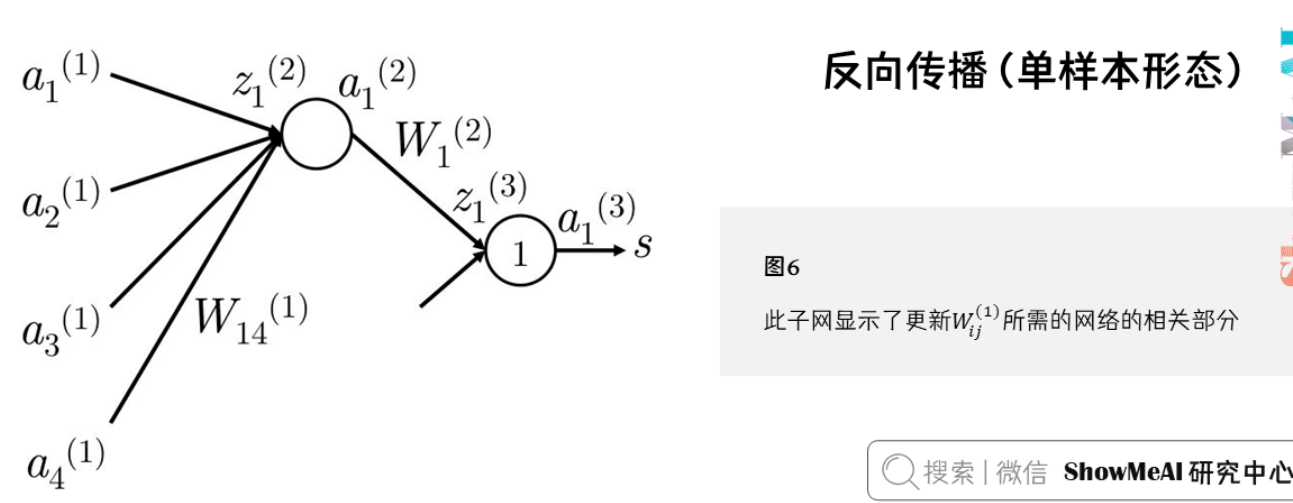
反向传播的梯度只受它们所贡献的值的影响。
$a_1^{(2)}$在前向计算中和$W_1^{(2)}$相乘计算得分。
最大间隔损失下:
$$
\frac{\partial J}{\partial s} = \frac{\partial J}{\partial s_c} = -1
$$
为了简化只分析$\frac{\partial s}{\partial W_{ij}^{(1)}}$,所以:
$$
\frac{\partial s}{\partial W_{ij}^{(1)}} = \sum_i W_i^{(2)} f’(z_i^{(2)}) a_j^{(1)}
$$
详细链式法则推导如下:
$$
\frac{\partial s}{\partial W_{ij}^{(1)}} = \frac{\partial s}{\partial a_i^{(2)}} \frac{\partial a_i^{(2)}}{\partial z_i^{(2)}} \frac{\partial z_i^{(2)}}{\partial W_{ij}^{(1)}}
$$
$$
= W_i^{(2)} f’(z_i^{(2)}) a_j^{(1)}
$$
其中$a_j^{(1)}$指输入层的输入。最终梯度可简化为$\delta_i^{(2)} a_j^{(1)}$,其中$\delta_i^{(2)}$本质上是第2层第$i$个神经元反向传播的误差。
偏置更新
偏置项的更新和权值在数学形式上是等价的,只是在计算下一层神经元输入时相乘的值是常量1。
一般步骤
- 有$\delta_i^{(k)}$向后传播的误差$\delta_j^{(k-1)}$
- $\delta_i^{(k)}$与路径上的权值$w_{ij}^{(k-1)}$相乘,误差反向传播到$a_j^{(k-1)}$
- $a_j^{(k-1)}$接收的误差是$\delta_i^{(k)} w_{ij}^{(k-1)}$
- $a_j^{(k-1)}$可能参与多条路径,需要累加
- 实际上,误差是$\sum_i \delta_i^{(k)} w_{ij}^{(k-1)}$
- $a_j^{(k-1)}$的误差为$f’(z_j^{(k-1)}) \sum_i \delta_i^{(k)} w_{ij}^{(k-1)}$
向量化形态
为了提高计算效率,我们通常使用向量化形式进行批量计算。这种方式能够充分利用现代硬件的并行计算能力。
在实际神经网络训练中,常基于一批样本来更新网络权重。高效的方式是向量化,直接一次更新权值矩阵和偏置向量。
对于参数$W^{(k)}$,其梯度误差为:
$$
\nabla_{W^{(k)}} = \delta^{(k+1)} (a^{(k)})^T
$$
其中$\delta^{(k+1)}$是反向传播的误差向量,$a^{(k)}$是前向激活输出。
这样,整个矩阵形式的梯度就是误差向量和前向激活的外积。
矩阵形式的梯度计算:
- $\frac{\partial L}{\partial W} = \frac{1}{m} \sum_{i=1}^m \delta^{(i)} \cdot (x^{(i)})^T$,考虑所有样本的梯度
- $\frac{\partial L}{\partial b} = \frac{1}{m} \sum_{i=1}^m \delta^{(i)}$,偏置的批量更新
计算效率优化:
- 使用矩阵运算代替循环,提高计算速度
- 缓存中间结果,避免重复计算
- 批量处理,提高内存访问效率
示例
例题
简单
▸简单反向传播计算示例
网络结构
单输入、单隐藏单元、单输出神经网络:
$x \xrightarrow{w_1} h \xrightarrow{\text{ReLU}} a \xrightarrow{w_2} \hat{y}$
前向传播公式
$h = w_1 x,\quad a = \text{ReLU}(h),\quad \hat{y} = w_2 a$
给定数值
$x = 2,\quad y = 10,\quad w_1 = 1,\quad w_2 = 3$
前向计算
$h = 1 \times 2 = 2,\quad a = \max(0,2) = 2,\quad \hat{y} = 3 \times 2 = 6$
损失函数(MSE,单样本)
$L = \frac{1}{2}(\hat{y} - y)^2 = \frac{1}{2}(6 - 10)^2 = 8$
反向传播(链式法则)
输出层梯度:
$\frac{\partial L}{\partial \hat{y}} = \hat{y} - y = -4$
权重 $w_2$ 的梯度:
$\frac{\partial L}{\partial w_2}
= \frac{\partial L}{\partial \hat{y}} \cdot \frac{\partial \hat{y}}{\partial w_2}
= (-4) \cdot a
= -8$
激活值 $a$ 的梯度:
$\frac{\partial L}{\partial a}
= \frac{\partial L}{\partial \hat{y}} \cdot \frac{\partial \hat{y}}{\partial a}
= (-4) \cdot 3
= -12$
ReLU 导数:
$
\frac{\partial a}{\partial h} =
\begin{cases}
1, & h > 0
0, & h \le 0
\end{cases}
$
权重 $w_1$ 的梯度:
$\frac{\partial L}{\partial w_1}
= \frac{\partial L}{\partial a} \cdot \frac{\partial a}{\partial h} \cdot \frac{\partial h}{\partial w_1}
= (-12) \cdot 1 \cdot 2
= -24$
梯度汇总
$\boxed{\frac{\partial L}{\partial w_2} = -8,\quad \frac{\partial L}{\partial w_1} = -24}$
梯度下降更新(学习率 $\eta = 0.1$)
$w_2 \leftarrow 3 - 0.1(-8) = 3.8,\quad w_1 \leftarrow 1 - 0.1(-24) = 3.4$
核心理解
反向传播利用链式法则,将输出误差逐层分配给各参数,梯度刻画了每个参数对损失的“责任”,参数沿负梯度方向更新以减小损失。
矩阵
▸**矩阵形式的反向传播计算示例(Linear Layer)**
网络结构(向量 → 标量)
一个最基本的线性层 + 损失函数:
$$
\mathbf{x} \xrightarrow{\mathbf{W}} \hat{y} \xrightarrow{\text{MSE}} L
$$
其中:
- 输入向量:$\mathbf{x} \in \mathbb{R}^d$
- 权重向量:$\mathbf{W} \in \mathbb{R}^d$
- 输出标量:$\hat{y} \in \mathbb{R}$
前向传播公式
$$
\hat{y} = \mathbf{W}^\top \mathbf{x}
$$
损失函数(单样本 MSE)
$$
L = \frac{1}{2}(\hat{y} - y)^2
$$
反向传播目标
计算权重梯度:
$$
\frac{\partial L}{\partial \mathbf{W}}
$$
Step 1:损失对输出的梯度
$$
\frac{\partial L}{\partial \hat{y}} = \hat{y} - y
$$
Step 2:输出对权重的梯度
由于:
$$
\hat{y} = \mathbf{W}^\top \mathbf{x} \quad \Rightarrow \quad
\frac{\partial \hat{y}}{\partial \mathbf{W}} = \mathbf{x}
$$
Step 3:链式法则(关键一步)
$$
\frac{\partial L}{\partial \mathbf{W}}
= \frac{\partial L}{\partial \hat{y}} \cdot \frac{\partial \hat{y}}{\partial \mathbf{W}}
= (\hat{y} - y) \mathbf{x}
$$
最终梯度结果(向量形式)
$$
\boxed{
\frac{\partial L}{\partial \mathbf{W}} = (\hat{y} - y) \mathbf{x}
}
$$
参数更新(梯度下降)
学习率 $\eta$:
$$
\mathbf{W} \leftarrow \mathbf{W} - \eta (\hat{y} - y) \mathbf{x}
$$
与标量版本的对应关系
- 标量情况:$w \leftarrow w - \eta (\hat{y}-y)x$
- 向量情况:$\mathbf{W} \leftarrow \mathbf{W} - \eta (\hat{y}-y)\mathbf{x}$
唯一的变化是:“数” → “向量”,链式法则完全一致
核心理解
在线性层中,反向传播的梯度等于:输出误差 × 输入特征
- 输入越大,对参数更新影响越大
- 误差为零时,梯度为零
这也是 Transformer、MLP、Embedding 层反向传播的基础单元
复杂的矩阵
▸**矩阵形式的反向传播示例(Softmax + CrossEntropy)**
问题设置(多分类)
- 类别数:$C$
- logits(未归一化输出):$\mathbf{z} \in \mathbb{R}^{C}$
- 真实标签(one-hot):$\mathbf{y} \in \mathbb{R}^{C}$,其中 $y_k \in {0,1}$
模型结构
$$
\mathbf{z} \xrightarrow{\text{Softmax}} \hat{\mathbf{p}} \xrightarrow{\text{CrossEntropy}} L
$$
前向传播公式
$$
\hat{p}i = \frac{e^{z_i}}{\sum{j=1}^{C} e^{z_j}}
$$
交叉熵损失(单样本)
$$
L = - \sum_{i=1}^{C} y_i \log \hat{p}_i
$$
反向传播目标
计算 logits 梯度:
$$
\frac{\partial L}{\partial \mathbf{z}}
$$
Step 1:Softmax + CrossEntropy 简化结果
对于 Softmax + CrossEntropy,链式法则简化得到:
$$
\frac{\partial L}{\partial z_i} = \hat{p}_i - y_i
$$
或矩阵形式:
$$
\frac{\partial L}{\partial \mathbf{z}} = \hat{\mathbf{p}} - \mathbf{y}
$$
Step 2:接上线性层(例如 Transformer 分类头)
假设 logits 来自线性层:
$$
\mathbf{z} = \mathbf{W}^\top \mathbf{h}, \quad
\mathbf{h} \in \mathbb{R}^{d}, \quad
\mathbf{W} \in \mathbb{R}^{d \times C}
$$
Step 3:线性层梯度(权重 & 隐藏状态)
权重梯度:
$$
\frac{\partial L}{\partial \mathbf{W}} = \mathbf{h} (\hat{\mathbf{p}} - \mathbf{y})^\top
$$
隐藏状态梯度(反传到下游):
$$
\frac{\partial L}{\partial \mathbf{h}} = \mathbf{W} (\hat{\mathbf{p}} - \mathbf{y})
$$
Step 4:参数更新(梯度下降)
学习率 $\eta$:
$$
\mathbf{W} \leftarrow \mathbf{W} - \eta , \mathbf{h} (\hat{\mathbf{p}} - \mathbf{y})^\top
$$
核心理解
在多分类任务中,反向传播的本质是:
$$
\text{error vector} = \hat{\mathbf{p}} - \mathbf{y}
$$
- 线性层梯度 = 输入 × error
- Softmax + CrossEntropy 将复杂的雅可比矩阵化简为简单的误差向量
这也是 Transformer、BERT、GPT 分类头训练信号的核心单元
Self-Attention 反向传播(单头)
▸Self-Attention 的反向传播(单头)
结构定义
输入序列:$X \in \mathbb{R}^{n \times d}$
权重矩阵:$W_Q, W_K, W_V \in \mathbb{R}^{d \times d_k}$
前向传播
$Q = X W_Q,\quad K = X W_K,\quad V = X W_V$
$S = \frac{QK^\top}{\sqrt{d_k}}$
$A = \text{softmax}(S)$
$O = A V$
反向传播目标
已知 $\frac{\partial L}{\partial O}$,求:
$\frac{\partial L}{\partial W_V},;
\frac{\partial L}{\partial W_Q},;
\frac{\partial L}{\partial W_K}$
Step 1:从输出回传到 V
$\frac{\partial L}{\partial V} = A^\top \frac{\partial L}{\partial O}$
$\frac{\partial L}{\partial A} = \frac{\partial L}{\partial O} V^\top$
Step 2:穿过 Softmax
对每一行 $A_i = \text{softmax}(S_i)$:
$\frac{\partial L}{\partial S_i}
= A_i \odot \left(
\frac{\partial L}{\partial A_i}
- \left\langle \frac{\partial L}{\partial A_i}, A_i \right\rangle
\right)$
Step 3:回传到 Q 和 K
$\frac{\partial L}{\partial Q}
= \frac{1}{\sqrt{d_k}}
\frac{\partial L}{\partial S} K$
$\frac{\partial L}{\partial K}
= \frac{1}{\sqrt{d_k}}
\left(\frac{\partial L}{\partial S}\right)^\top Q$
Step 4:回传到权重矩阵
$\frac{\partial L}{\partial W_V}
= X^\top \frac{\partial L}{\partial V}$
$\frac{\partial L}{\partial W_Q}
= X^\top \frac{\partial L}{\partial Q}$
$\frac{\partial L}{\partial W_K}
= X^\top \frac{\partial L}{\partial K}$
核心理解
- Attention 的梯度流是
输出 → V → A → (Q, K) → 权重 - Softmax 决定了梯度如何在 token 间分配
- 缩放项 $\frac{1}{\sqrt{d_k}}$ 同时影响前向和反向的稳定性
Transformer 的反向传播,本质仍然是:
矩阵乘法 + Softmax 的链式法则
对应 PyTorch 代码:
1 | import torch |
深度神经网络
基础概念
深度神经网络通过多层非线性变换,能够学习更复杂的特征表示。每一层都从前一层提取更高层次的特征,最终形成层次化的特征表示。
- 网络结构:
- 输入层:$x \in \mathbb{R}^{n_0}$,原始输入数据
- 隐藏层:$h^{(l)} = \sigma(W^{(l)}h^{(l-1)} + b^{(l)})$,第l层的特征表示
- 输出层:$y = W^{(L)}h^{(L-1)} + b^{(L)}$,最终预测结果
- 前向传播:
- 第l层输入:$z^{(l)} = W^{(l)}h^{(l-1)} + b^{(l)}$,线性变换
- 第l层输出:$h^{(l)} = \sigma(z^{(l)})$,非线性激活
- 最终输出:$y = h^{(L)}$,网络预测
- 反向传播:
- 输出层误差:$\delta^{(L)} = \frac{\partial L}{\partial y} \odot \sigma’(z^{(L)})$,计算输出层梯度
- 隐藏层误差:$\delta^{(l)} = (W^{(l+1)})^T\delta^{(l+1)} \odot \sigma’(z^{(l)})$,误差反向传播
- 参数梯度:$\frac{\partial L}{\partial W^{(l)}} = \delta^{(l)}(h^{(l-1)})^T$,计算权重更新量
训练技巧
深度网络的训练需要特殊的技巧来确保稳定性和性能。这些技巧包括归一化、残差连接等,它们能够帮助网络更好地学习和收敛。
- 批量归一化:
- 计算均值:$\mu_B = \frac{1}{m}\sum_{i=1}^m x_i$,批次数据的均值
- 计算方差:$\sigma_B^2 = \frac{1}{m}\sum_{i=1}^m (x_i - \mu_B)^2$,批次数据的方差
- 归一化:$\hat{x}_i = \frac{x_i - \mu_B}{\sqrt{\sigma_B^2 + \epsilon}}$,标准化数据
- 缩放和平移:$y_i = \gamma \hat{x}_i + \beta$,可学习的参数调整
- 残差连接:
- 基本形式:$h^{(l)} = F(h^{(l-1)}) + h^{(l-1)}$,添加跳跃连接
- 梯度传播:$\frac{\partial L}{\partial h^{(l-1)}} = \frac{\partial L}{\partial h^{(l)}}(1 + \frac{\partial F}{\partial h^{(l-1)}})$,缓解梯度消失
- 层归一化:
计算均值:$\mu = \frac{1}{H}\sum_{i=1}^H x_i$,特征维度上的均值
计算方差:$\sigma^2 = \frac{1}{H}\sum_{i=1}^H (x_i - \mu)^2$,特征维度上的方差
归一化:$\hat{x}_i = \frac{x_i - \mu}{\sqrt{\sigma^2 + \epsilon}}$,标准化特征
多模型集成,提高泛化能力
网络架构
不同的网络架构适用于不同的任务,包括卷积神经网络、循环神经网络等。
- 卷积神经网络:
- 卷积层:$h_{i,j} = \sum_{m,n} w_{m,n}x_{i+m,j+n} + b$,提取局部特征
- 池化层:$h_{i,j} = \max_{m,n} x_{i+m,j+n}$,降维和特征选择
- 全连接层:$h = \sigma(Wx + b)$,最终分类
- 循环神经网络:
- 基本RNN:$h_t = \sigma(W_{hh}h_{t-1} + W_{xh}x_t + b_h)$,处理序列数据
- LSTM:$f_t = \sigma(W_f[h_{t-1}, x_t] + b_f)$,长短期记忆
- GRU:$z_t = \sigma(W_z[h_{t-1}, x_t] + b_z)$,门控循环单元
- 注意力机制:
- 注意力分数:$e_{ij} = a(s_i, h_j)$,计算相关性
- 注意力权重:$\alpha_{ij} = \frac{\exp(e_{ij})}{\sum_k \exp(e_{ik})}$,归一化权重
- 上下文向量:$c_i = \sum_j \alpha_{ij}h_j$,加权求和
技巧与概念
梯度检查
梯度检查是验证反向传播实现正确性的重要工具。通过比较数值梯度和解析梯度,我们可以确保梯度计算的准确性。
- 数值梯度近似方法:
- 中心差分公式:$\frac{\partial f}{\partial x} \approx \frac{f(x + h) - f(x - h)}{2h}$,提供更准确的梯度估计
- 前向差分公式:$\frac{\partial f}{\partial x} \approx \frac{f(x + h) - f(x)}{h}$,计算量较小但精度较低
- 梯度检验实现:
1 | def eval_numerical_gradient(f, x): |
正则化
正则化是防止过拟合的重要技术,通过限制模型复杂度来提高泛化能力。
为什么正则化能够防止过拟合 :正则化之所以能防止过拟合,是因为它改变了优化目标,使模型在拟合数据的同时,为“复杂度”付出代价,从而排除那些依赖极端参数、只对训练噪声有效的解。
- L1正则化:
- 损失函数:$J = L + \lambda \sum_w |w|$,增加权重绝对值的惩罚项
- 梯度更新:$w = w - \alpha(\frac{\partial L}{\partial w} + \lambda \cdot \text{sign}(w))$,权重更新时考虑L1正则化项
- 作用:促使权重稀疏化,有助于特征选择和模型压缩
- 特点:L1正则化会使部分权重变为0,适合高维稀疏特征场景
- L2正则化:
- 损失函数:$J = L + \frac{\lambda}{2} \sum_w w^2$,增加权重平方和的惩罚项
- 梯度更新:$w = w - \alpha(\frac{\partial L}{\partial w} + \lambda w)$,权重更新时考虑正则化项
- Frobenius范数:$||W||F = \sqrt{\sum{i=1}^m \sum_{j=1}^n |w_{ij}|^2}$,用于衡量权重矩阵的大小
- 正则化系数λ的选择:
- 太大:模型欠拟合,无法学习到数据特征
- 太小:模型过拟合,无法泛化到新数据
- 偏置项不参与正则化原因:
- 偏置项对模型复杂度影响小,主要影响决策边界的位置
- 偏置项不需要正则化也能学习到合适的值
随机失活Dropout
Dropout是一种强大的正则化技术,通过随机丢弃神经元来防止过拟合,提高模型的泛化能力。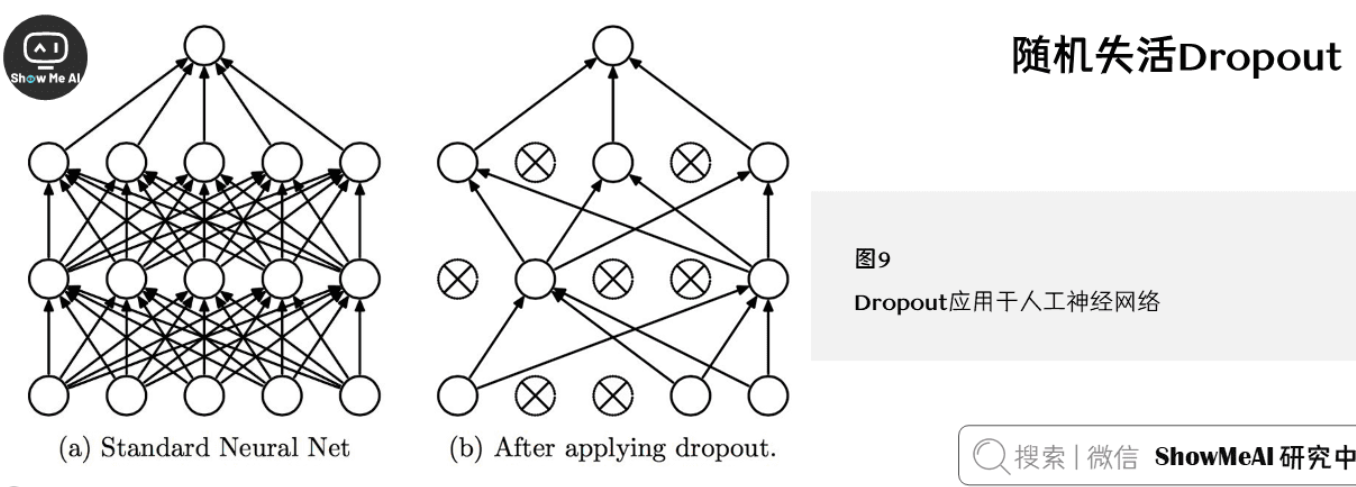
- Dropout原理:
- 训练时随机丢弃部分神经元,强制网络学习更鲁棒的特征
- 测试时使用全部神经元,但需要缩放输出
- 缩放因子:$1/(1-p)$,补偿训练时的丢弃
- 训练和测试阶段的处理:
- 训练:$h_{drop} = h \odot m, m \sim Bernoulli(p)$,随机mask
- 测试:$h_{test} = h \cdot (1-p)$,期望输出
- 集成学习解释:
- 每次dropout相当于训练一个子网络
- 最终模型相当于多个子网络的集成,提高泛化能力
- 贝叶斯学习解释:
- 可以看作是对参数的后验分布采样
- 每个子网络对应一个参数样本
- RNN中的变分Dropout:
- 对非循环连接进行dropout
- 在时间维度上保持相同的mask,保持时序一致性
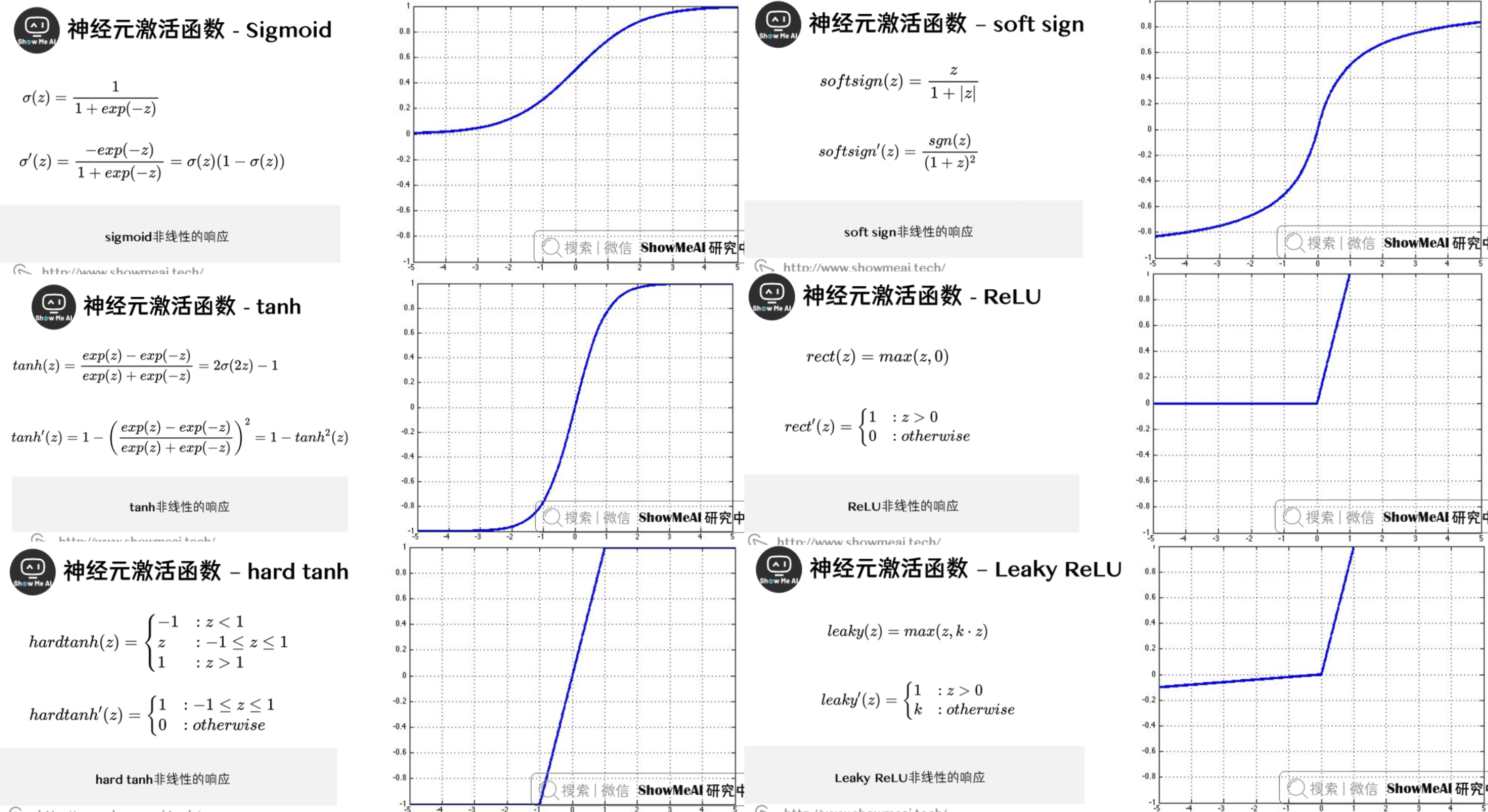
激活函数
激活函数为神经网络引入非线性,使其能够学习复杂的模式。不同的激活函数适用于不同的场景。
- Sigmoid:
- 公式:$\sigma(x) = \frac{1}{1 + e^{-x}}$,将输入压缩到[0,1]区间
- 梯度:$\sigma’(x) = \sigma(x)(1-\sigma(x))$,在极端值处梯度接近0
- 特点:输出范围[0,1],容易饱和,导致梯度消失
- tanh:
- 公式:$\tanh(x) = \frac{e^x - e^{-x}}{e^x + e^{-x}}$,将输入压缩到[-1,1]区间
- 梯度:$\tanh’(x) = 1 - \tanh^2(x)$,在0处梯度最大
- 特点:输出范围[-1,1],零中心化,但仍有饱和问题
- hard tanh:
- 公式:$\mathrm{hardtanh}(x) = \begin{cases} -1 & x < -1 \ x & -1 \leq x \leq 1 \ 1 & x > 1 \end{cases}$,对输入进行截断,限制在[-1,1]区间
- 梯度:$\mathrm{hardtanh}’(x) = \begin{cases} 1 & -1 \leq x \leq 1 \ 0 & \text{otherwise} \end{cases}$,区间外梯度为0
- 特点:计算量小,数值会饱和(大于1或小于-1时恒为1或-1),有时比tanh更优选
- soft sign:
- 公式:$\mathrm{softsign}(x) = \frac{x}{1 + |x|}$,平滑地将输入压缩到(-1,1)区间
- 梯度:$\mathrm{softsign}’(x) = \frac{\mathrm{sgn}(x)}{(1 + |x|)^2}$,sgn为符号函数
- 特点:不会像hard clipped functions那样早饱和,平滑且零中心化,是tanh的另一种选择
- ReLU:
- 公式:$f(x) = \max(0, x)$,简单而有效
- 梯度:$f’(x) = \begin{cases} 1 & \text{if } x > 0 \ 0 & \text{if } x \leq 0 \end{cases}$,计算简单
- 特点:计算简单,缓解梯度消失,但可能出现死亡ReLU问题
- Leaky ReLU:
- 公式:$f(x) = \max(\alpha x, x), \alpha < 1$,允许负值梯度
- 梯度:$f’(x) = \begin{cases} 1 & \text{if } x > 0 \ \alpha & \text{if } x \leq 0 \end{cases}$,避免完全死亡
- 特点:解决死亡ReLU问题,保持负值信息
| 激活函数 | 输出范围 | 是否零中心 | 饱和性/梯度消失 | 计算复杂度 | 其他优缺点/适用场景 |
|---|---|---|---|---|---|
| Sigmoid | (0, 1) | 否 | 极易饱和,梯度消失严重 | 较高 | 早期常用,输出非零中心,易导致梯度消失,训练深层网络效果差,适合二分类输出层 |
| tanh | (-1, 1) | 是 | 饱和,梯度消失 | 较高 | 零中心化,收敛快于Sigmoid,但深层仍有梯度消失问题 |
| hard tanh | [-1, 1] | 是 | 区间外恒定,区间内线性,区间外梯度为0 | 极低 | 计算量小,数值易饱和,适合对计算资源要求高的场景,有时可替代tanh |
| soft sign | (-1, 1) | 是 | 不易早饱和,梯度平滑 | 较低 | 平滑零中心,梯度变化缓慢,适合需要平滑激活的场景,是tanh的替代选择 |
| ReLU | [0, +∞) | 否 | x<0时梯度为0,易”死亡” | 极低 | 计算简单,缓解梯度消失,收敛快,广泛用于深层网络,但有死亡ReLU问题 |
| Leaky ReLU | (-∞, +∞) | 否 | x<0时梯度为α,避免死亡 | 极低 | 保持负值信息,解决死亡ReLU,适合深层网络,α需调参 |
数据预处理
数据预处理是提高模型性能的关键步骤,通过标准化和归一化使数据更适合神经网络学习。
- 去均值:
- 计算训练集均值:$\mu = \frac{1}{m}\sum_{i=1}^m x^{(i)}$,中心化数据
- 减去均值:$x = x - \mu$,使数据分布以0为中心
- 归一化:
- 计算标准差:$\sigma = \sqrt{\frac{1}{m}\sum_{i=1}^m (x^{(i)} - \mu)^2}$,衡量数据分散程度
- 归一化:$x = \frac{x - \mu}{\sigma}$,使数据分布更加均匀
- 白化:
- 计算协方差矩阵:$\Sigma = \frac{1}{m}\sum_{i=1}^m (x^{(i)} - \mu)(x^{(i)} - \mu)^T$,描述特征间关系
- 特征值分解:$\Sigma = U\Lambda U^T$,获取主成分
- 白化:$x_{white} = U\Lambda^{-1/2}U^Tx$,消除特征间相关性
参数初始化
参数初始化对神经网络的训练至关重要,好的初始化可以加速收敛并提高模型性能。
- Xavier初始化:
- 均匀分布:$W \sim U(-\sqrt{\frac{6}{n_{in} + n_{out}}}, \sqrt{\frac{6}{n_{in} + n_{out}}})$,保持方差
- 正态分布:$W \sim N(0, \sqrt{\frac{2}{n_{in} + n_{out}}})$,高斯分布版本
- 保持激活方差和梯度方差:
- 输入方差:$\text{Var}(x) = 1$,标准化输入
- 输出方差:$\text{Var}(y) = 1$,保持信号强度
- 权重方差:$\text{Var}(W) = \frac{2}{n_{in} + n_{out}}$,防止梯度消失/爆炸
学习策略
学习策略决定了模型如何从数据中学习,包括学习率的选择和调整方法。
- 学习率选择:
- 初始学习率:$\alpha_0 = 0.01$,常用起始值
- 验证集调优,找到最佳学习率
- 学习率衰减:
- 步长衰减:$\alpha = \alpha_0 \cdot \gamma^{\lfloor t/s \rfloor}$,定期降低学习率
- 指数衰减:$\alpha = \alpha_0 \cdot e^{-kt}$,平滑降低
- 时间衰减:$\alpha = \frac{\alpha_0}{1 + kt}$,渐进式降低
- 学习率预热:
- 线性预热:$\alpha = \alpha_0 \cdot \min(1, t/T)$,逐步增加学习率
- 余弦预热:$\alpha = \alpha_0 \cdot \frac{1}{2}(1 + \cos(\pi(1 - t/T)))$,平滑过渡
优化算法
总览
优化算法是神经网络训练的核心,它们决定了模型如何从数据中学习。
- 优化目标:
- 最小化损失函数:$\min_\theta L(\theta)$,找到最优参数
- 参数更新:$\theta_{t+1} = \theta_t - \alpha_t \nabla L(\theta_t)$,梯度下降
- 优化算法分类:
- 一阶优化:梯度下降及其变体,计算简单
- 二阶优化:牛顿法、拟牛顿法,收敛更快
- 自适应优化:根据参数特性调整学习率
梯度下降
梯度下降是最基本的优化算法,有多种变体以适应不同场景。
- 批量梯度下降(BGD):
- 更新规则:$\theta_{t+1} = \theta_t - \alpha \frac{1}{m}\sum_{i=1}^m \nabla L_i(\theta_t)$,使用所有样本
- 特点:计算准确但计算量大,适合小数据集
- 随机梯度下降(SGD):
- 更新规则:$\theta_{t+1} = \theta_t - \alpha \nabla L_i(\theta_t)$,使用单个样本
- 特点:计算快但噪声大,适合大规模数据
- 小批量梯度下降(MBGD):
- 更新规则:$\theta_{t+1} = \theta_t - \alpha \frac{1}{b}\sum_{i=1}^b \nabla L_i(\theta_t)$,使用小批量样本
- 特点:平衡计算效率和收敛性,最常用
动量优化
动量方法通过累积历史梯度来加速收敛,减少震荡,提高训练稳定性。
- 标准动量:
- 速度更新:$v_t = \gamma v_{t-1} - \alpha \nabla L(\theta_t)$,累积梯度
- 参数更新:$\theta_{t+1} = \theta_t + v_t$,更新参数
- 特点:加速收敛,减少震荡,提高稳定性
- Nesterov动量:
- 速度更新:$v_t = \gamma v_{t-1} - \alpha \nabla L(\theta_t + \gamma v_{t-1})$,提前计算梯度
- 参数更新:$\theta_{t+1} = \theta_t + v_t$,更新参数
- 特点:更准确的方向,收敛更快
- 动量方法原理:
- 累积历史梯度,形成”惯性”
- 减少震荡,使优化路径更平滑
- 加速收敛,特别是在平坦区域
- 实现伪代码:
1 | def sgd_momentum(w, dw, config=None): |
自适应学习率优化
自适应优化算法能够根据参数特性自动调整学习率,提高训练效率。
- AdaGrad:
- 累积平方梯度:$G_t = G_{t-1} + g_t^2$,记录历史梯度
- 更新规则:$\theta_t = \theta_{t-1} - \frac{\alpha}{\sqrt{G_t + \epsilon}} \odot g_t$,自适应学习率
- 特点:适合稀疏数据,但学习率衰减快
- RMSProp:
- 移动平均:$G_t = \beta G_{t-1} + (1-\beta)g_t^2$,指数移动平均
- 更新规则:$\theta_t = \theta_{t-1} - \frac{\alpha}{\sqrt{G_t + \epsilon}} \odot g_t$,动态调整
- 特点:解决AdaGrad学习率衰减问题,保持长期记忆
- Adam:
- 一阶矩:$m_t = \beta_1 m_{t-1} + (1-\beta_1)g_t$,梯度一阶矩
- 二阶矩:$v_t = \beta_2 v_{t-1} + (1-\beta_2)g_t^2$,梯度二阶矩
- 偏差修正:$\hat{m}_t = \frac{m_t}{1-\beta_1^t}, \hat{v}_t = \frac{v_t}{1-\beta_2^t}$,修正初始偏差
- 更新规则:$\theta_t = \theta_{t-1} - \frac{\alpha}{\sqrt{\hat{v}_t} + \epsilon} \odot \hat{m}_t$,结合动量和自适应
- 特点:结合动量和自适应学习率的优点,最常用
二阶优化方法
二阶优化方法利用Hessian矩阵信息,收敛更快但计算成本高。
- 牛顿法:
- 更新规则:$\theta_{t+1} = \theta_t - H^{-1}\nabla L(\theta_t)$,使用Hessian矩阵
- 特点:收敛快但计算Hessian矩阵代价大
- 拟牛顿法:
- BFGS算法,近似Hessian矩阵
- L-BFGS算法,限制内存使用
- 特点:近似Hessian矩阵,降低计算复杂度
优化算法改进
为了进一步提高优化效果,可以采用各种改进策略。
- 梯度裁剪:
- 阈值裁剪:$g = g \cdot \min(1, \frac{\theta}{||g||})$,限制梯度范数
- 范数裁剪:$g = g \cdot \min(1, \frac{\theta}{||g||_2})$,L2范数裁剪
- 学习率调度:
- 循环学习率:$\alpha_t = \alpha_{min} + \frac{1}{2}(\alpha_{max} - \alpha_{min})(1 + \cos(\frac{t}{T}\pi))$,周期性调整
- 余弦退火:$\alpha_t = \alpha_{min} + \frac{1}{2}(\alpha_{max} - \alpha_{min})(1 + \cos(\frac{t}{T}\pi))$,平滑降低
- 早停策略:
- 验证集监控,防止过拟合
- 耐心参数设置,容忍性能波动
- 最佳模型保存,记录最优结果
方法比较
不同优化算法有各自的优缺点,需要根据具体问题选择。
- 收敛速度:
- 一阶方法:线性收敛,计算简单
- 二阶方法:二次收敛,计算复杂
- 自适应方法:超线性收敛,平衡效率和效果
- 内存消耗:
- SGD:最小,适合大规模数据
- Adam:中等,需要存储动量
- 二阶方法:最大,需要存储Hessian
- 适用场景:
- 小数据集:SGD + 动量,稳定可靠
- 大数据集:Adam,自适应高效
- 特殊任务:特定优化器,根据需求选择
代码实现
1 | # SGD with Momentum |
发展趋势
优化算法领域正在不断发展,涌现出许多新的研究方向。
- 自适应优化:
- 动态学习率,根据训练过程调整
- 参数特定学习率,针对不同参数
- 自适应批量大小,动态调整批量
- 分布式优化:
- 数据并行,处理大规模数据
- 模型并行,处理大模型
- 混合并行,结合多种并行策略
- 优化算法理论:
- 收敛性分析,理论保证
- 稳定性研究,提高可靠性
- 泛化性分析,提高模型性能
实践流程
模型训练流程
- 数据准备:
- 数据清洗和预处理
- 数据集划分(训练集、验证集、测试集)
- 数据增强和标准化
- 模型构建:
- 网络架构设计
- 层数和神经元数量选择
- 激活函数选择
- 训练过程:
- 参数初始化
- 优化器选择
- 学习率设置
- 批量大小确定
- 模型评估:
- 训练集和验证集性能监控
- 过拟合检测
- 模型调优
超参数调优
- 网格搜索:
- 参数空间定义
- 搜索策略
- 评估指标选择
- 随机搜索:
- 参数分布设置
- 采样策略
- 资源分配
- 贝叶斯优化:
- 代理模型构建
- 采集函数选择
- 参数更新策略
- 自动化调优:
- 早停策略
- 学习率自适应
- 批量大小动态调整
评估与验证
- 评估指标:
- 准确率、精确率、召回率
- F1分数、ROC曲线
- 混淆矩阵
- 交叉验证:
- K折交叉验证
- 留一法
- 分层抽样
- 模型比较:
- 统计显著性检验
- 模型复杂度分析
- 计算资源消耗
部署与优化
- 模型压缩:
- 知识蒸馏
- 模型剪枝
- 量化技术
- 推理优化:
- 批处理
- 模型并行
- 硬件加速
- 部署策略:
- 模型版本控制
- 服务监控
- 性能优化
问题与解决
- 过拟合:
- 增加训练数据
- 使用正则化
- 早停策略
- Dropout
- 欠拟合:
- 增加模型复杂度
- 减少正则化强度
- 调整学习率
- 梯度问题:
- 梯度消失:使用ReLU、残差连接
- 梯度爆炸:梯度裁剪、权重初始化
- 训练不稳定:
- 批量归一化
- 学习率预热
- 优化器选择
代码示例
1 | # 模型训练流程 |